











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
El motor eléctrico es un convertidor no ideal de energía eléctrica a mecánica, los motores modernos de alta eficiencia alcanzan valores de conversión de energía de hasta 95% para potencias superiores a los 50 caballos de fuerza (hp) y para motores con potencias no menores de 3 hp sus eficiencias son superiores a un 90%. La deficiente conversión de energía provoca el incremento de temperatura interna en la máquina tal y como lo explican los modelos térmicos descritos por [1], [2], [3], [4]. La ecuación (1) muestra que un incremento de las pérdidas en la máquina provoca un decrecimiento de la eficiencia de forma proporcional.
 (1)
(1)
donde η es la eficiencia y P loss , P in son las potencias por pérdidas y potencia de entrada del motor, respectivamente. El mínimo cambio en las pérdidas de la máquina no solo afecta la eficiencia, sino que esa energía adicional desperdiciada es convertida en calor. Medir la temperatura interna no es suficiente para explicar de dónde proviene ese calor.
Se propone utilizar índices que relacionan los distintos tipos de pérdidas de potencia del motor con el fin de utilizarlos para determinar el fallo1 o la alteración en la condición de operación del motor, es decir, un fallo en la máquina repercute en su eficiencia y por lo tanto en los índices propuestos. Este trabajo se organiza de la siguiente forma: la sección II hace una descripción de las pérdidas del motor y los índices propuestos. En la sección III se muestra el banco de pruebas y las pruebas realizadas al motor, la sección IV muestra los experimentos realizados utilizando los cinco índices para la construcción de un prototipo de sistema de diagnóstico basado en redes neuronales artificiales, además se realiza un análisis de la variabilidad de los índices bajo condiciones tanto normales como anormales del motor, tomando en cuenta la sensibilidad y similitud entre los índices propuestos para identificar y categorizar faltas en el motor. La sección V presenta un análisis de resultados general y, finalmente, la sección VI las conclusiones.
Pérdidas del motor de inducción y definición de índices
Las potencias por pérdidas son resultado de un deficiente proceso de conversión de energía eléctrica a mecánica. Así, la potencia total de pérdida se calcula como la diferencia entre la potencia de entrada P in y la de salida P out , tal y como se muestra en la ecuación (2)
 (2)
(2)
donde P s representa la pérdida del estator, P r la del rotor y P mis las potencias mecánica y misceláneas. Además, la potencia por pérdidas del estator P s se calcula por medio de la ecuación (3), donde P cs es la potencia de pérdida por efecto Joule en los devanados estatóricos y P ns la potencia por pérdidas en el núcleo debido a corrientes parásitas e histéresis.
 (3)
(3)
 (4)
(4)
La potencia P cs se calcula como en la ecuación (4), donde R s es la resistencia estatórico medida a la temperatura ambiente, los términos I a , I b , I c son las corrientes por fase, el término ∆θ representa la diferencia de temperatura del devanado estatórico y la temperatura ambiente.
Por otro lado, las potencias por pérdidas del rotor P
r
se determinan según la ecuación (5), donde s es un número adimensional que se calcula según la ecuación (6), n
scr
es la velocidad sincrónica y n
mec
es la velocidad mecánica del motor  (5)
(5)
 (6)
(6)
Luego, la pérdida P mis se puede estimar como en la ecuación (7)
 (7)
(7)
donde χ oscila entre [0, 0.11] según datos de [5], se puede calcular de forma experimental por medio de las pérdidas mecánicas y misceláneas.
Dado que las ecuaciones (3) y (5) dependen de P
ns
, es necesario estimarla. Para ello, se sustituye (3), (5) y (7) en (2) para obtener la potencia del núcleo P
ns
en términos de parámetros medidos  (8)
(8)
Nuevamente, al sustituir (8) en (3) y (5) se obtienen expresiones que solamente dependen de las mediciones realizadas. De esta forma las expresiones para P s y P r , tomando χ = 0, son aproximadas por las expresiones en (9) y (10).
 (9)
(9)
 (10)
(10)
Definición de índices
En esta sección se definen cinco índices calculados por medio de las pérdidas del motor expuestas anteriormente. En conjunto, estos índices logran determinar si hay cambios en la carga del motor, alteraciones en el voltaje de alimentación o un calentamiento por pobre ventilación. Los índices que se proponen son  (11)
(11)
El índice I cs establece una relación entre las pérdidas que ocurren por efecto Joule entre el devanado estatórico y las pérdidas totales, este índice varía de acuerdo a los cambios en el voltaje de alimentación. A su vez I ns calcula la relación entre la potencia disipada en el núcleo de la máquina y la total desperdiciada. El índice I r relaciona las pérdidas del rotor entre el total de pérdidas. Los índices I rcs y I sr buscan establecer las relaciones específicas entre dos tipos de pérdidas de potencia, el primer caso establece la relación entre potencias perdidas en el rotor y cobre del estator y el segundo índice relaciona las pérdidas del rotor y el estator.
Banco de pruebas
El banco de pruebas para motores trifásicos que se construyó se compone de un generador de corriente directa de 5 kW y un banco de resistencias de 7 kW. El banco posee tres auto transformadores monofásicos conectados en estrella para provocar bajos y altos voltajes de alimentación así como desbalances. En la Figura 1a se muestra una fotografía parcial del banco de pruebas implementado.
Figura 1 a) Banco de pruebas implementado. Tomado de [6] b) Interfaz gráfica con los índices calculados en tiempo real.
Para interconectar el banco de pruebas con el sistema de adquisición de datos, se desarrolló una aplicación informática [6] que gestiona el banco de pruebas y somete los motores a experimentos controlados en donde se definen los parámetros de la prueba. La aplicación controla los estímulos del motor (carga del motor, tiempos de encendido o apagado), monitorea su reacción y se registra todas las variables de interés.
El programa implementa, en tiempo real, el cálculo de los cinco índices propuestos tal como se muestra en la Figura 1b. Cada segundo se publica la media móvil de los últimos diez valores con la finalidad de suavizar las curvas. Cuando la prueba finaliza, la aplicación guarda, en archivo de texto, todas las variables eléctricas, mecánicas y los índices propuestos. Así, el archivo contiene los índices calculados en cada segundo durante la prueba.
Pruebas realizadas
El motor en estudio es de la marca Baldor modelo M3558 de 2hp, 230 V, 60 Hz. Los fallos a los que se somete el motor se realizaron durante su transitorio térmico. Un buen modelo que aproxima este comportamiento lo plantea [7], indicando que la respuesta térmica del motor se modela como un sistema de primer orden cuyo resultado se presenta en la ecuación (12).
(12)
Donde θ y θA son las temperaturas interna y la ambiental respectivamente, el término P loss representa la totalidad de pérdidas del motor como se mostró en la sección 2, el término R th representa una resistencia térmica equivalente del motor, C th representa la capacitancia térmica equivalente del motor y el término t representa el tiempo.
El estado estable de la máquina sin fallos asociados se alcanza en 5t, donde t=R
th
C
th
. Sin embargo, para efectos experimentales se considera que se alcanza el equilibrio térmico cuando dos cambios consecutivos de la temperatura interna, separados por un lapso de cinco minutos, no varía en menos de un grado centígrado, esto es  (13)
(13)
Para el motor en cuestión, el transitorio térmico experimental se alcanzó aproximadamente en los 8000 segundos bajo el criterio anterior. Durante todo el transitorio térmico se somete el motor a una condición anormal, ya sea subvoltaje, desbalance o un cobertor que simula poca ventilación, dichas condiciones se denominan fallos tipo uno, dos o tres, respectivamente, el cuadro 1 muestra la descripción de los mismos.
De forma similar al 100% de carga, se realizaron pruebas al 75% y al 50% de carga, en el código de la prueba se sustituye el término C100 por C75 y C50, según corresponda.
La Figura 2 muestra el comportamiento de la temperatura del motor ante los tres tipos de fallos indicados anteriormente y la curva de funcionamiento normal, al 100% de carga. En dicha figura se puede observar que la diferencia entre el comportamiento de cada fallo y el comportamiento normal es mínima, por lo que detectar alguno de esos fallos en el motor no es una tarea sencilla.
Experimentos realizados y valoración de índices
Esta sección muestra los experimentos realizados y sus resultados con el fin de determinar la viabilidad de los índices para el diagnóstico de fallos. Primeramente, se utilizó una red neuronal artificial como prototipo de un sistema de diagnóstico automático. Posteriormente, se utilizan mapas autoorganizados para analizar si los índices poseen redundancia. Finalmente, se realiza un análisis gráfico de los índices para distintas pruebas en donde se confirma que existe duplicidad en la información que aportan algunos indicadores.
Redes neuronales
Una red neuronal artificial es un modelo simplificado del sistema neuronal humano [8],[9]. La unidad más simple de una red neuronal es la neurona artificial, la cual posee dos etapas, la primera suma los productos de la entrada I(j) por el factor de su peso de arco W(j), luego se le suma un factor de polarización llamado bias b.
La segunda etapa consiste en utilizar el resultado de la suma anterior y realizar la activación de la neurona mediante una función de transferencia. Existen varios tipos de funciones de activación [10], entre ellas Sigmoid(a) Logsig(a), Purelin(a), para este trabajo se utiliza la llamada Tansig(a) . La Figura 3a muestra una representación gráfica del modelo descrito anteriormente y la ecuación (14) su representación algebraica.
(14)
Clasificador basado en red neuronal
Se diseñó una red neuronal artificial (RNA) tipo “feedforward” para decidir si un motor eléctrico presenta alguno de los tres tipos de fallos descritos en el cuadro 1 o si se encuentra en funcionamiento normal. La red posee diez entradas distribuidas de la siguiente forma: cinco entradas una para cada índices calculado en un instante específico y las otras cinco entradas para los valores anteriores a las muestras actuales. La red posee una capa oculta de diez neuronas y una capa de salida con cuatro neuronas, una por cada fallo más la salida para el funcionamiento normal. Cada una de las neuronas son idénticas y poseen el funcionamiento de la ecuación (14). Las neuronas de la capa oculta se definieron con la siguiente regla heurística  (15)
(15)
donde N e y N s representa cantidad de entradas y salidas respectivamente. Se definieron diez neuronas ocultas con el fin de incrementar la exactitud y disminuir el error cuadrático medio.
La Figura 3b muestra la descripción anterior, los rombos representan los puertos de entrada y el término Z -1 indica que esa entrada específica ingresa la muestra anterior del dataset, W 1 representa la matriz de pesos de la capa oculta, esta matriz posee dimensión 10×10 y la matriz de pesos de las neuronas de salida se representa como W 2 yposee una dimensión de 4×10.
La salida vectorial Fde la red neuronal queda descrita por la ecuación (16).
 (16)
(16)
donde I es el vector de entradas, b 1 es el vector de bias de las neuronas de la capa oculta de tamaño 10×1 y b 2 es el bias de las neuronas de la capa de salida que posee un tamaño 4×1.
Entrenamiento de red
A fin de ajustar los pesos almacenados en las matrices W 1 , W 2 y en los vectores b 1 y b 2 se realizaron varios entrenamientos supervisados de la red. El mejor resultado se logró con el algoritmo Levenberg-Marquardt con aprendizaje basado en gradiente descendente y momento. La tasa de aprendizaje usada fue de 0.01 y la constante del momento usada fue de 0.9.
Tal y como se mencionó, el motor en estudio se expuso a los fallos descritos en el cuadro 1 y se almacenaron en cada segundo, los cinco índices definidos en la sección 2.1. El fallo a que se somete el motor está presente durante el transitorio térmico.
Para construir el conjunto de datos de prueba (dataset) se unificaron las tres pruebas y la prueba en funcionamiento sin fallo, dicho dataset posee más de 36000 registros. Posteriormente, se muestreó de forma uniforme cada 180 muestras y se construyó el dataset definitivo que posee 200 registros, cada 50 registros corresponde a una prueba específica. Es importante señalar que los 50 registros calculan los índices en distintos instantes del transitorio térmico del motor.
Con la arquitectura de la red neuronal y el dataset definitivo se procedió, primeramente, a realizar el entrenamiento supervisado con el algoritmo de retropropagación. La retropropagación es una técnica en la que la red es entrenada con un conjunto de entradas y salidas conocidas y para cada iteración del algoritmo, los pesos de las matrices W y b son auto ajustados, con el fin de minimizar el error entre la salida actual y su valor esperado. Este ajuste se aplica desde las capas de salida hasta las capas de entrada, de ahí el nombre de retropropagación. Para el presente trabajo este algoritmo no brindó los resultados esperados dado que el error cuadrático medio presentó valores alrededor de 0.22, considerado alto por los autores. Por esta razón se optó por utilizar el algoritmo Levenberg-Marquardt que se utiliza para minimizar funciones por mínimos cuadrados no lineales [9].
La Figura 4 muestra la gráfica de error cuadrático medio (mse) versus la cantidad de entrenamientos completos con el dataset definitivo. Se observa un mse de 0.03197 en veintiocho epochs.
Una vez entrenada la red, se construyó un segundo dataset con la finalidad de probarla. Se definió un valor umbral de aceptación de fallos mayor a 0.85. Así, cuando la RNA arroja, en una salida, un valor superior al umbral se considera que la red ha detectado una condición particular, ya sea funcionamiento normal o fallo tipo uno, dos o tres.
Un valor muy alto del umbral hace que el sistema de clasificación genere muchos falsos negativos, es decir, que no detecte cuando hay fallos específicos. Por otro lado, con bajos valores del umbral se corre el riesgo de generar falsos positivos, es decir que el sistema indique que hay un fallo específico cuando en realidad no existe.
La Figura 5 muestra los resultados de la RNA con el segundo dataset construido. Al igual que el primero, este dataset posee 200 registros, y cada 50 muestras corresponde a un tipo de fallo, las primeras 50 muestras pertenecen al fallo tipo uno, los siguientes 50 registros al fallo tipo dos y así sucesivamente. Se señala nuevamente que las 50 muestras para cada prueba realizada poseen un espaciamiento temporal uniforme de 180 segundos. Esto a su vez implica que los cinco índices fueron calculados durante el régimen transitorio de temperatura.
Además, se observa en la Figura 5 que, con los índices propuestos, la RNA detecta los fallos tipo 1 en cualquier instante del transitorio térmico en que ocurra. Esto concuerda con la primera gráfica de correlación de la Figura 6, que muestra la correlación del resultado de la red versus el valor real. Para este caso el valor de correlación es de R = 0.98889.
Para la prueba del motor con el fallo inducido tipo dos, este presenta tanto falsos negativos como falsos positivos. Este se ve reflejado en el índice de correlación de resultados versus valores reales que es de R = 0.8483. Para las pruebas tipo tres, la RNA no diagnostica algunos casos de este fallo cuando el motor lo sufre (falso negativo), su índice de correlación es de 0.86592. Finalmente, cuando la red no presenta fallo la RNA logra determinar la gran mayoría de los casos, el índice de correlación es de 0.93703.
Mapas autoorganizados
Un mapa autoorganizado (SOM) es un tipo de red neuronal artificial, que se entrena utilizando un aprendizaje no supervisado para producir una representación discreta del espacio de las muestras de entrada [8], [9]. Organizándolas o agrupándolas de acuerdo a patrones o características comunes, tomando en cuenta tanto la competitividad, como la cooperatividad entre dichas muestras. En la etapa de competitividad, para cada muestra I(j) se selecciona la neurona con la distancia euclidea más pequeña, según la ecuación (21), donde cada neurona representa una región en el espacio de entrada.
 (17)
(17)

La neurona con vector de pesos más similar a la entrada es la ganadora. Por otro lado, en la etapa de cooperatividad, cada neurona se compara con sus neuronas vecinas, en la cual tanto el vector de pesos de la neurona ganadora es actualizado, por medio de una regla de actualización ∆w i , como el mallado de su vecindario. Para ello se utiliza una función Gaussiana de vecindad Λ, centrada en la neurona ganadora y decreciente respecto a la distancia de la neurona ganadora.
(18)
donde r i y r i * representan los nodos del mallado discreto con una topología regular [11 ].
Similitud de índices con pruebas al 100% de carga por medio de SOM
Con la finalidad de analizar y detectar similitudes entre el comportamiento de los cinco índices definidos en la sección 2.1, se entrenó un SOM de 4 × 4 neuronas, con una tasa de aprendizaje t=0.02 y desviación estándar σΛ=0.45, tomando como entradas los valores de los cinco índices en las pruebas definidas en el Cuadro 1.
La Figura 7 muestra los resultados del entrenamiento del mapa autoorganizado con una malla de 4 × 4, donde las neuronas en negro indican que no hay valores asociados a las mismas. Además, la escala de colores amarillo-rojo indica que entre más intenso u oscuro es el tono hay más valores asociados a la neurona, el amarillo representa menor intensidad y el rojo mayor intensidad. Así, según el patrón obtenido con el SOM, los cinco índices propuestos se pueden organizar en tres grupos
suponiendo que mapas similares indican características y comportamiento similares de los índices. Por lo que se podría reducir la cantidad de índices a solamente tres, uno por grupo
Tomando los tres anteriores como representativos o significativos, y además suficientes, para entrenar la RNA de la sección 4.1. y así intentar describir el comportamiento con fallo del motor.
Variabilidad de índices
Siguiendo los resultados obtenidos por medio del SOM para el caso de pruebas al 100% de carga, se realizó un análisis de los índices por tipo de fallo, de manera independiente, y además se generalizo para pruebas al 75% y al 50% de carga. Con el objetivo de validar la agrupación y selección de índices realizada en la sección 4.2.1. y además analizar la variación de los mismos por tipo de prueba (100%, 75% y 50% de carga) y por tipo de fallo (condiciones normales del motor, subvoltaje, desbalance y cobertor).
En las Figuras 8 se muestra la distribución de los valores de cada índice bajo condiciones nominales del motor y para cada uno de los tres fallos con los que se entrenó la RNA de la sección 4.1. (subvoltaje con 200V, 3% de desbalance y cobertor) y además se analizó un caso más de desbalance al 4%.
Tomando como referencia el valor de los índices en el tiempo y en cada una de las pruebas de manera independiente, cada color representa un índice y cada uno de los recuadros está centrado en la media de los valores de cada índice, según corresponda. Por lo que se puede observar la variación de cada índice respecto a su media y respecto a la variación de los demás índices en cada una de las pruebas.
La Figura 8 muestra como los recuadros en azul, negro y rojo mantienen un patrón similar, en rango, en cada una de las pruebas, en contraposición a los recuadros verde y amarillo que presentan una variación más marcada en sus posiciones de una prueba a otra. Por otro lado, se puede observar como el par de recuadros amarillo-negro se complementan en dimensión y el amarillo siempre contiene al negro. Asimismo el par verde-rojo siempre se traspone de la misma manera, con una intersección significativa entre ellos.
Además, la Figura 9a muestra los índices al 100% de carga por medio de una representación lineal, donde el centro de cada franja de color está dado por la media de cada índice en el tiempo, según corresponda. Con lo que es posible reafirmar lo observado en la Figura 8.
Los resultados anteriores coinciden con los obtenidos por medio del SOM en la Figura 7, dado que en el mapa autoorganizado se toman en cuenta los índices de manera conjunta, en condiciones nominales y con los tres tipos de fallos (subvoltaje, desbalance y cobertor) para realizar su representación gráfica. Ubicando a I CS y a I rs bajo un mismo patrón de comportamiento, lo mismo para I ns y I rcs , y categorizando los índices en tres grupos.
Así, tomando como referencia un índice por grupo, I r , I rcs y I rs son suficientes para entrenar la RNA de la sección 4.1., utilizándola para caracterizar el comportamiento del motor y ubicarlo en alguno de los cinco estados analizados: condición nominal del motor, subvoltaje con 200V, 3% de desbalance, 4% de desbalance y cobertor, tal y como se muestra en la Figura 9b.
Generalizando los resultados anteriores para los casos al 75% y al 50% de carga, se toman en cuenta las pruebas en condiciones nominales del motor, con fallo tipo 1 (subvoltaje con 200V) y fallo tipo 3 (cobertor) al 75% de carga, ver Figuras 10-11.
Para el caso de 50% de carga, se toman en cuenta las pruebas en condiciones nominales del motor, con fallo tipo 1 (subvoltaje con 200V) y con fallo tipo 2 (3% de desbalance), ver Figuras 12-13.
Similarmente al caso con 100% de carga, en las figuras 10-11a y 12-13a se puede observar como la complementariedad del par de índices I ns -I rcs (amarillo-negro) y el patrón de comportamiento del par I cs -I r (verde-azul) se mantiene para los casos al 75% y al 50% de carga, según corresponda. Así, en las figuras 11b y 13b se muestra la representación gráfica lineal de los índices que se toman como representativos para entrenar la RNA de la sección 4.1. y así intentar caracterizar y categorizar el funcionamiento del motor, ahora al 75% y al 50% de carga.

Análisis de resultados
Los resultados de la RNA muestran que los índices propuestos logran discriminar los fallos inducidos al motor durante su transitorio térmico con 100% de carga. Es decir estos índices son capaces de operar en régimen transitorio como en régimen estable, lo que permite ser utilizados e implementados en el diagnóstico en tiempo real de los motores eléctricos.
Además, los resultados que arroja la RNA pueden ser fácilmente mejorados si se realizan acciones como:
Aumentar al tamaño del datasetcon pruebas similares en otro momento.
Aumentar la cantidad de las capas ocultas de la RNA y/o neuronas en cada capa.
Incrementar las entradas de la RNA retardadas, es decir, agregar entradas con doble retardo Z -2 para cada índice
Explorar con otros algoritmos entrenamiento adaptativos / evolutivos.
Realizar estudios más detallados variando los parámetros de inicio de los algoritmos.
Explorar otras topologías de redes neuronales tales como RNA dinámicas, etc.
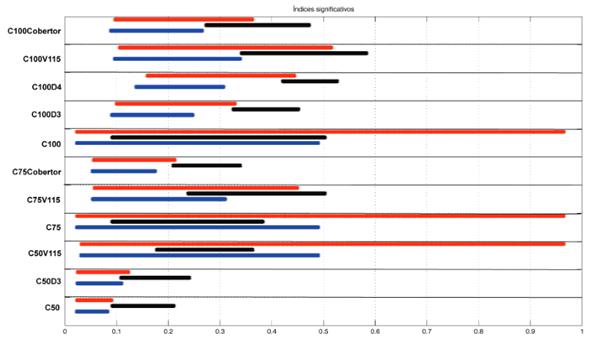
Por otro lado, el análisis en la similitud y variación de los índices realizado por medio de SOM indica que es suficiente con tomar solamente tres índices, dado que es posible agruparlos en tres grupos de acuerdo a sus patrones de comportamiento en el tiempo, bajo tres porcentajes de carga (100, 75 y 50) y ante distintos tipos de fallo (subvoltaje, desbalance y cobertor). Así, se toman I r - I rcs - I rs como índices representativos o significativos para entrenar la RNA, categorizar el comportamiento del motor en el tiempo y así detectar algunos de los fallos definidos en el cuadro 1.
En la Figura 14 se muestra el resumen de los índices representativos, en todos los casos presentados en la sección 4.3., donde se puede notar que dichos índices pueden ser capaces de discriminar no solo por tipo de fallo sino que también por porcentaje de carga.
Conclusiones
En este trabajo se valoraron cinco índices basados en las distintas pérdidas de motor con la intensión de diagnosticar fallos específicos en la máquina. Se realizó un análisis teórico de sensibilidad para observar si los índices son capaces de diagnosticar nueve tipos de fallos distintos. Se requiere realizar más análisis al respecto pero se vislumbra que los índices en conjunto pueden mapear distintos fallos que afectan la máquina.
La viabilidad de utilizar los índices, para constituir un sistema que diagnostique fallos en tiempo real, se ha demostrado utilizando una red neuronal artificial entrenada con los índices calculados en distintos instantes del régimen transitorio. Esto permite que cuando un fallo particular aparezca, ya sea en régimen transitorio o estable, el sistema con pocas muestras sea capaz de determinar el tipo de fallo que afecta al motor.

