











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introduction
A characteristic of the gait is the symmetry in the motion of the body. A symmetrical gait represents a high quality of life. There are regions of the body pathologically limited to motor dysfunction. This leads to an asymmetrical gait pattern (Lauziere et al., 2014).
But first the question arises: What is a symmetrical gait? The motion of the right and left foot are identical in a symmetrical motion, but shifted by a half period.
The assessment of gait symmetry can be divided into two major areas, namely discrete based and time series based area (Yang et. al., 2011; Liao et. al., 2008; Hassan et. al., 2014). The first area of symmetry evaluation is discrete-based. These methods are often used with wearable devices (Patterson et. al., 2010; Steinmetzer et. al., 2020b). Discrete-based methods include Symmetry Ratio (Andres & Stimmel, 1990), Robinson Index (Herzog et al., 1989), Gait asymmetry (Plotnik et al., 2007) and Symmetry Angle (Zifchock et al., 2011). In all these methods, symmetry is calculated from various parameters such as stride length, stride duration, swing phase duration, and stance phase duration.
We want to introduce a new way to calculate symmetry for wearable devices. The outstanding feature of our method is that the complete time series of the gait cycle is used for the symmetry analysis. This makes the calculation of the symmetry more accurate than using discrete-based methods for symmetry calculation. An important part of the method is Dynamic Time Warping (DTW) (Keogh & Ratanamahatana, 2005).
In section 2 we give a short theoretical background to the gait cycle, introduce the data set, and employed hardware. In section 3 we explain the calculation of symmetry with regards to the use of wearables by current methods and our DTW-based method. Afterwards we present the results of the calculation with all methods in section 4. In section 5 we discuss the advantages and disadvantages of the different methods and a preview of future work. The last section 6 gives a summary of the work.
Material
Dataset
For the calculation of the gait symmetry, we use force sensor data. For this we use a public dataset. This consists of 93 patients with idiopathic PD, and a control group of 73 subjects. The database includes the vertical ground reaction force records of the subjects as they walked at their usual, self-selected pace for approximately 2 minutes on level ground, see Table 1. Underneath each foot were placed 8 sensors (Ultraflex Computer Dyno Graphy, Infotronic Inc.) that measure force (in Newtons) as a function of time. The output of each of these 16 sensors has been digitized and recorded at 100 samples per second, and the records also include two signals that reflect the sum of the 8 sensor outputs for each foot. For details about the data format, see (Goldberger et al., 2000).
Methodology
Stride detection
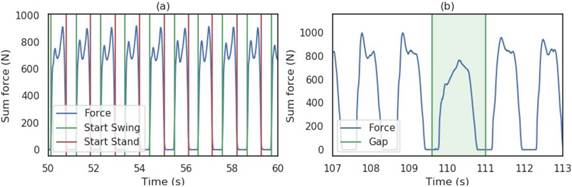
The focus of this work is not on stride detection. For this reason, a simple method is used. As soon as the sum of all force sensors is greater or equal to 100 N, this is considered the beginning of the stance phase.
Conversely, swing phases are detected as soon as the sum of all force sensors is less than 100 N, see Fig. 1 (a).
The large gaps in Fig. 1 (b) correspond to the turning of the person at the end of the corridor. By using interquartile range (IQR) the gaps are cut out (Steinmetzer et. al., 2020).
Table 1 Demographics of the data set
| Study Group | Count | Male/Female | (mean ± std) |
| Total PD | 93 | 58/35 | 66.30 ± 9.50 |
| Control | 73 | 40/33 | 63.66 ± 8.64 |
Note: Derived from research.
Discrete symmetry
Discrete symmetry calculation by using various parameters is used for analysis of gait with wearable devices (Jelén et. al., 2008; Sadeghi et. al., 2000; Ashhar et. al., 2017). For comparison with our method, we introduce the methods: Ratio index (RI), Symmetry index (SI), Gait asymmetry (GA), and Symmetry angle (SA), see equations 1 to 4.
For the calculation of discrete symmetry, we use several features of the right and left foot. The smaller feature is xmin and the bigger xmax. In this way, we get a value between zero and one. Xmin and Xmax are features consisting of swing phase duration, stand phase duration, and stride duration.
Xmin is the larger value of feature i in the left and right stride.
Ratio Index. To determine the RI, the central values of the foots are divided by each other.
 (1)
(1)
Symmetry Index. The SI gives the difference between kinematic and kinetic parameters of the limbs. We have adjusted the value so that 1 represents a symmetrical gait and 0 asymmetry.
 (2)
(2)
Gait Asymmetry. Gait Asymmetry is similar to the Ratio Index (Crea et al., 2014; Yang and Hsu, 2010). However, the logarithm was still calculated from the result.
 (3)
(3)
Symmetry Angle. SA measures the relationship between two different limbs. Two exactly symmetrical parameters form an angle of 45º. We have corrected the value, a symmetric value is again 1 and an asymmetric 0.
 (4)
(4)
Normalized DTW symmetry: Preprocessing
Normally DTW is used as a distance measurement. The greater the result, the greater the distance between the two signals. The more asymmetrical is the gait cycle. To better interpret the results of symmetry, we normalize them. A value close to 1 shows a symmetrical motion and a value close to 0 an asymmetrical motion. To enable stride symmetry calculation, the values would first have to be standardized and normalized. For the standardization we use the z-transformation, see equation 5. Through this standardization, the expected value of the data is = 0 and the standard deviation s = 1.
 (5)
(5)
For standardization, the times series of all recordings of all subjects are concatenated with each other to form a uniform model for standardization.
To ensure a value range between 0 and 1 we use min-max normalization
 (6)
(6)
To calculate the Normalized Dynamic time warping symmetry ratio, we perform a phase shift. Thus, both strides are directly above each other. For the calculation of symmetry, both signals are at the beginning of the same gait cycle phase.
Normalized DTW
For the calculation of similarity of symmetry of the force data of the right and left foot, we use DTW. In contrast to Euclidean distance, this method can correct time warp. The advantage of DTW is that the time series does not need to have the same length, because the optimal alignment from one signal to the other is used. The algorithm starts with the calculation of a distance matrix D, where the force data of both time series the left and right foot y and x are used as input. For the calculation of the distances the following equation is used (Keogh & Ratanamahatana, 2005).
 ..(7)
..(7)
Then the distance must be divided by the maximum signal length
 (8)
(8)
In order to get a result of 1 for symmetry and 0 for asymmetry, the 1 minus result is calculated by
 (9)
(9)
Results
Dataset
In table 2 the results of the dataset from section 2.1 are shown. The study subjects were separated according to control group and Parkinson disease. It is noticeable that the results of the discrete symmetry calculation are similar to the DTW. We have calculated the average value and the standard deviation s.
Table 2 Results of the dataset for features Ratio Index (RI), Symmetry Index (SI), Gait Asymmetry (GA), Symmetry Angle (SA), and Normalized Dynamic Time Warping Symmetry (NDTWS)
| Study | RI  ± s ± s |
SI ± s |
GA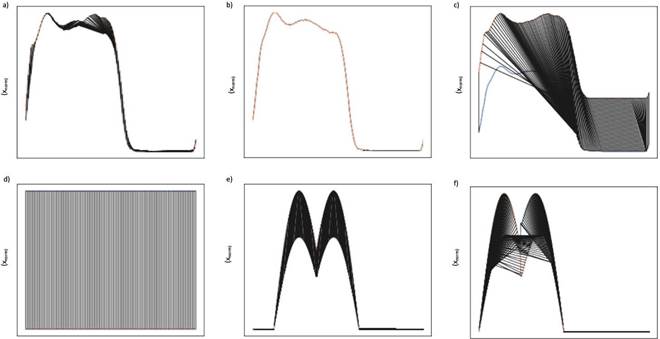 ± s ± s |
SA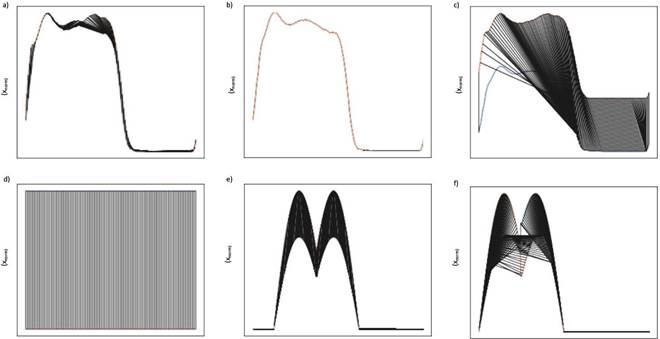 ± s ± s |
NDTWS ± s |
|---|---|---|---|---|---|
| Total CO | 0.955 ± 0.016 | 0.949 ± 0.021 | 0.947 ± 0.025 | 0.984 ± 0.006 | 0.960 ± 0.018 |
| Total PD | 0.949 ± 0.027 | 0.942 ± 0.039 | 0.938± 0.055 | 0.982 ± 0.011 | 0.960 ± 0.016 |
Note: Derived from research.
Theoretical cases
In this section we present the results obtained for the theoretical signals of both feet by using discrete and DTW methods. In figure 2 the DTW of the following signals is shown: (a) regular stride, (b) identical strides, (c) amplitude shifted strides, (d) uniform amplitude shifted, (e) Heel strike and toe off with same force on left foot, right foot lesser force, and (f) Left foot has heel strike more force then toe off, right foot
Figure 2 Results of DTW symmetry. (a) regular stride time series; (b) identical stride of right and left foot; (c) amplified, shifted strides; (d) uniform amplitude shifted; (e) heel strike and toe off with same force on left foot, right foot lesser force; (f) left foot has heel strike more force then toe off, right foot has toe off more force then heel strike.
has toe off more force then heel strike. The results for these signals are shown in the Table 3. It can be seen that the discrete methods cannot correctly calculate the signals (c), (d), (e), and (f).
Discussion
In most of the papers dealing with symmetry, stride length, stride duration, and different gait phases are used to calculate the ratio of the left and right leg (Hannink et al., 2018; Jiang et al., 2018). In contrast, our symmetry calculation considers the complete time series.
Our results show RI, SI, GA, SA, and DTW to be very similar for the given data set. The results confirm the findings of other studies (Blazkiewicz et al., 2014; Hubble et al., 2015).
However, the weaknesses of the discrete symmetry calculation are visible in the results disclosed in section 4.2. If the parameters were chosen incorrectly in the symmetry calculation, asymmetries of the gait may not have been visible. We were able to demonstrate this phenomenon in the second part of the results. In figure 2 (c), (e), and (f) the discrete symmetry was always 1.0, but the signals were different in amplitude. These differences could not be measured. By using the presented method, the whole signal was used for the calculation of symmetry. Thus, it was possible to calculate not only the symmetry differences in the time but also in the amplitude domain.
Conclusion
For discrete symmetry calculation, a wide spectrum of features is important for a robust symmetry calculation. With our proposed method this is not necessary.
We were able to demonstrate that our
method is a useful extension for the calculation of gait symmetry with wearable sensors. In future works it should be proved how symmetry calculation using DTW works in multidimensional signals.
Acknowledgement
This article was created under the bilateral Erasmus+ Agreement between University of Las Palmas de Gran Canaria (Spain) and Brandenburg University of Technology Cottbus-Senftenberg (Germany).

