











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
El plan de estudios de la Escuela de Topografía, Catastro y Geodesia (ETCG) de la Universidad Nacional (UNA) considera dos cursos de ajuste geodésico en el nivel de bachillerato, mientras que, en el nivel de licenciatura, considera uno más. También en la licenciatura se imparten los cursos Diseño Geodésico 1 y Diseño Geodésico 2, en los cuales se aplican y refuerzan los conocimientos sobre ajuste geodésico.
En el curso Ajuste 1, comúnmente se trabajan los primeros contenidos con cálculo manual, algo que se considera adecuado porque se busca que el estudiantado conozca a detalle el algoritmo de ajuste geodésico. Sin embargo, conforme se avanza en la construcción del conocimiento y se incrementa la complejidad de los problemas, el cálculo manual no es una opción viable por el tiempo requerido, por lo que surge la necesidad de utilizar herramientas informáticas para el cálculo y la visualización grafica de resultados.
El plan de estudios a nivel de bachillerato y licenciatura busca dar al estudiantado de la carrera, conocimientos teóricos y prácticos en los métodos geodésicos actuales y utilizar estos conocimientos en la solución de problemas en aplicaciones como en el monitoreo de obra civil, monitoreo de objetos naturales como fallas geológicas, volcanes; en el establecimiento de redes de control para replanteo en obra civiles, en el establecimiento y mantenimiento del marco geodésico de referencia horizontal y vertical oficial de un país; aspectos que contribuyen con otras geociencias como la Sismología, la Geofísica y la Vulcanología. El elemento en común que tiene las aplicaciones comentadas es que para su logro se requiere de conocimientos en ajuste geodésico.
En el mercado se ofrecen aplicaciones para el ajuste geodésico, como por ejemplo PANDA 1, COLUMBUS 2 y GAMA 3, por citar algunos ejemplos. También hay programas bajo la filosofía de libre uso, pero no de código abierto o programas libres cuya funcionalidad es limitada (considerando los requerimientos de la ETCG). Por otro lado, están los programas comerciales que tienen una gama más alta de funcionalidades, pero cuyo licenciamiento generalmente tiene un elevado costo y que se ofrecen mediante suscripciones anuales o que cada nueva versión debe pagarse. Esto representa un obstáculo, ya que en diversas ocasiones el estudiantado carece de acceso a los programas fuera de las instalaciones de la ETCG. Además, estas licencias comerciales generalmente no ofrecen la posibilidad de acceder al código fuente, lo que cierra así la oportunidad de mejorar o ampliar el sistema.
La ETCG ha experimentado con programas como COLOMBUS, el cual es un programa comercial; no obstante, sus licencias tienen un costo anual. Otro ejemplo es el actual software con el cual se cuenta para el ajuste de observaciones realizadas con Sistemas Satelitales de navegación Global (GNSS, por sus siglas en Ingles), del cual se tienen solo cinco licencias, pero están desactualizadas y requieren una clave (llave) física para ser utilizados.
Al ser la programación en herramientas informáticas una habilidad que se desarrolla en las carreras de ingeniería (por ejemplo, en el plan de estudio del año 2019 de la ETCG está el curso llamado Programación para Ingeniería), se considera que la ETCG tiene la capacidad que tienen otras universidades que desarrollan sus propias herramientas para ajuste geodésico. Esto ofrece la ventaja de que desarrollar una aplicación propia permite irla adecuando según los requerimientos de la unidad académica. Ello no tendría un costo adicional para la Unidad Académica, ya que la capacitación la pueden impartir los mismos docentes y se podría facilitar a los estudiantes para su uso.
El desarrollo de un programa de ajuste de redes geodésicas dentro de la Escuela de Topografía, permitiría a) eliminar los costos asociados a la compra de licencias, b) fortalecer la formulación de trabajos finales de graduación, c) fortalecer el proceso de enseñanza y aprendizaje en los cursos de la ETCG, d) fortalecer la investigación y venta de servicios dentro de la ETCG, ya que se los investigadores tendrán una herramienta para realizar el ajuste de redes geodésicas relacionadas a sus proyectos.
Con estos atestados, el objetivo general de la actividad de investigación fue desarrollar un programa informático para el ajuste geodésico de observaciones.
Marco Teórico
Modelo de Ajuste Geodésico por Mediatas
Según Verhagen y Teunissen (2017) el modelo de ajuste conocido como modelo Gauß-Markov (GMM, por sus siglas en ingles), utilizado en geodesia para el ajuste de redes, es un modelo lineal matemático, el cual se basa en las relaciones funcionales y estocásticas entre las observaciones li y los parámetros xj; en forma matricial esto se puede escribir como:
Ɩ = Ax + 𝜺
En donde:
l = vector de observaciones. xˆ = vector de parámetros ajustados. 𝜺 = vector de errores verdaderos. 𝐴 = matriz de coeficientes.
Este modelo sigue las siguientes hipótesis:
Todos los errores 𝜺i tienen una esperanza matemática nula.
Todos los residuos tienen la misma varianza, en general desconocida,
denotada como σ 0 2.
No hay correlación entre los residuos 𝜺i.
Estas tres hipótesis se pueden plantear como:
Donde:
E () = esperanza matemática var = varianza σ0 = desviación estándar a priori ε = vector de errores verdaderos
En cuanto al modelo estocástico de ajuste, cabe decir que todas las observaciones contienen algún margen de error; unas en mayor medida que otras. Se desea que las observaciones que contienen menos error influyan más en la determinación de los parámetros, para lo cual se utiliza una matriz de pesos (Leick, Rapoport y Tatarnikov, 2015, p.16).
La información a priori sobre la exactitud de las observaciones está contenida en la matriz 𝛴ll (matriz de varianza-covarianza de las observaciones) (Leick, Rapoport y Tatarnikov, 2015, p.16):
𝛴ll = σ2 Qll
donde:
σ = Desviación Estándar a priori Qll = Matriz de cofactores
A su vez, de acuerdo con Ghilani (2017) y Montenbruck y Eberhard (2000), la matriz de pesos es calculada como:
P = Qll -1
Si no existe o se desprecia la correlación entre las observaciones, la matriz de pesos será diagonal y los pesos son calculados como:
Pi = σ0 2 / σi 2
Donde σi 2 es la varianza a priori de la observación li . En general, las correlaciones entre las observaciones son difíciles de estimar o de modelar, por lo que generalmente se ignoran. Todo lo anterior conforma un modelo teórico; para aplicarlo a la estimación de los parámetros en el mundo real (Hofmann-Wellenhof, Lichtenegger y Wasle, 2007; Koch, 1999) se reescribe el modelo:
l + v = A xˆ
Donde:
l = vector de observaciones. xˆ = vector de parámetros ajustados. 𝜈 = vector de residuos. 𝐴 = matriz de coeficientes.
Estimación de los parámetros
Dado que las observaciones contienen errores, resulta complejo obtener los valores verdaderos de los parámetros. Se asume entonces que los errores son aleatorios y que tienen una esperanza matemática nula. El número de observaciones es usualmente mayor que el número de parámetros desconocidos en el GMM. La ecuación anterior representa entonces un sistema sobredeterminado (hay más observaciones que incógnitas) de ecuaciones, lo que conduce a la selección de un criterio para obtener una estimación óptima de los parámetros.
Un estimador se considera óptimo si cumple con dos condiciones; la primera es que el estimador sea no sesgado, es decir, el estimador debe tener una distribución de probabilidad centrada sobre el valor a estimar; la segunda condición a cumplir por el estimador es que debe tener una varianza mínima.
El GMM cumple con estas condiciones, por lo que las estimaciones de los parámetros que se obtienen son óptimas. Así, se tiene la función de estimación (Hofmann-Wellenhof, Lichtenegger y Wasle, 2007):
xˆ= ( AT P A ) AT P l
Esta función es llamada BLUE (Best Linear Unbiased Estimator) por sus siglas en inglés, o bien, mejor estimador lineal no sesgado (Caspary y Rueger, 1987, p.5).
Bajo los mismos criterios de optimización (Hofmann-Wellenhof, Lichtenegger y Wasle, 2007; Leick, Rapoport y Tatarnikov, 2015), el estimador de la varianza es:
El anterior estimador es llamado BIQUE (Best Invariant Quadratic Unbaised Estimator) por sus siglas en inglés (Caspary y Rueger, 1987, p. 103). Con el GMM se pueden obtener también otros resultados importantes como lo son la matriz de varianza-covarianza de las incógnitas 𝛴xx. En ella está contenida la información sobre la exactitud de los parámetros xˆ obtenidos con el ajuste. Esta matriz se calcula (Caspary y Rueger, 1987, p. 40):
𝛴 xx = σ 2 Q xx
Donde Q xx es la matriz de cofactores de los parámetros y es calculada como:
Qxx = (AT P A)-1
La exactitud de cada parámetro se obtiene de la siguiente forma (Caspary y Rueger, 1987, p. 44):
El valor qxi xi es el i-ésimo elemento de la diagonal principal de la matriz Qxx.
Con la matriz de los cofactores de las observaciones Qlˆ lˆ se obtiene la exactitud de las observaciones ajustadas (Caspary y Rueger, 1987, p. 6; Ghilani, 2017):
Qii = A Qx AT
La matriz de los cofactores de los residuos Qvv facilita la detección de errores groseros en las observaciones:
El vector de residuos V, se puede utilizar para controlar el modelo del ajuste bajo el criterio de mínimos cuadrados, usando el test global del modelo, el cual se detalla más adelante.
V = Qv P l
Test global del modelo
Según Haidar e Ibrahim (2021) y Hekimoglu, Demirel y Aydin (2002), asumir que las observaciones siguen una distribución normal con valor esperado Ax y con varianza 𝛴ll es:
s lN (Ax, ll)
El test global permite saber si el modelo del ajuste es correcto o no (esto no significa que el modelo escogido sea el mejor). El criterio del test global (también llamado hipótesis nula) se expresa como:
H 0 : E(S2) = σ 0 2
Y lleva a la prueba estadística:

El cual, bajo la hipótesis nula Ho, tiene una distribución 𝜒2 con n-u grados de libertad:
La prueba se realiza como:

𝛼 = nivel de incertidumbre
𝜒2 (n-u), 1-𝛼 == Probabilidad de error, valor crítico de la distribución chi-cuadrado.
Si T>𝜒2 (n-u), 1-𝛼, se acepta la hipótesis nula, es decir, el test no indica contradicciones entre las observaciones y el modelo matemático. Se debe hacer notar que este test no puede indicar que el modelo sea el mejor o que las observaciones sean correctas, solo indica que no hay contradicción entre el modelo planteado y las observaciones realizadas. En el caso opuesto, si T>𝜒2 (n-u), 1-𝛼, es necesario revisar el modelo estocástico.
Ajuste Libre
De acuerdo con Rodríguez, de Madeiro, Klein y Veiga (2020), en el ajuste libre lo que se hace es seleccionar todos los puntos de la red o algunos de ellos para que estos aporten con sus coordenadas la información necesaria para la determinación del datum de la red independientemente del datum del sistema de coordenadas usado.
Si se seleccionan todos los puntos de la red como nuevos, todos los puntos aportarán a la determinación del datum. A lo anterior se le llama ajuste libre con minimización total de traza. Si se seleccionan solo parte de los puntos de la red para determinar el datum se le llama ajuste con minimización parcial de traza.
La principal aplicación de las redes libres es la optimización de redes, además de ayudar a la búsqueda de errores groseros en las observaciones, ya que, al no estar ningún punto fijo, la geometría de la red está definida solo por las observaciones sin influencias externas.
Metodología de desarrollo del programa
Para el desarrollo del programa se inició con una etapa de definición y documentación de requerimientos del sistema. Se partió de una lista básica de funcionalidades con las que debería cumplir el sistema por desarrollar, la cual tuvo en cuenta:
Realizar ajuste con varianza cero (ajuste amarrado).
Realizar ajuste libre, con minimización total de traza.
Realizar ajuste libre con minimización parcial de traza.
Realizar iteraciones para mejorar las coordenadas aproximadas.
Realizar el test global del ajuste.
Realizar detección de errores groseros en las observaciones.
Efectuar ajustes en 1D y 2D.
Manejar grupos de observaciones tales como ángulos, direcciones, acimuts, distancias, coordenadas, diferencias de altura.
Calcular elipses de error y de confianza, tanto absolutas como relativas.
Presentar los resultados de la red ajustada en forma gráfica.
Basado en esta lista básica de requerimientos, se procedió a especificarlos mediante la técnica de prototipos para validar con los usuarios e interesados de proyecto que el diseño funcional corresponde con los requerimientos de software. Para esta etapa del desarrollo se interactuó con estudiantes de los cursos de Ajuste 1, Ajuste 2, Ajuste 3 y Diseño Geodésico 1. Con cada interacción se fue mejorado la funcionalidad del sistema para el ajuste de redes geodésicas, hasta tener un sistema que cumple con todas las necesidades de la ETCG para la enseñanza del ajuste geodésico de redes.
Se llevó a cabo una serie de pruebas del sistema de forma que se pudiera determinar si los resultados obtenidos eran correctos en cuanto exactitud y fiabilidad. En esta etapa, se contrastaron los resultados del programa con resultados obtenidos de forma manual y de otros programas de ajuste.
El programa fue desarrollado en la plataforma de MATLAB®. De acuerdo con MATLAB (2022); Moore, Olguín y Nuño (2007), este programa combina un entorno para el análisis iterativo y los procesos de diseño con un lenguaje de programación que expresa las matemáticas de matrices y arreglos directamente, además permite la integración con otros lenguajes de programación como C/C+, Python, Fortran y Java. Cabe destacar que el código del programa es compatible con la plataforma Octave, considerada el equivalente libre de MATLAB® (Nogueras, 2007).
Análisis de resultados
Para determinar la calidad de los resultados generados por el programa de ajuste se procedió a realizar una serie de pruebas que consistían en llevar a cabo varios ajustes de redes geodésicas de prueba. El programa fue capaz de calcular de forma correcta las coordenadas ajustadas de los vértices de la red y su desviación estándar, así como calcular el test global y la determinación de errores groseros en las observaciones.
El programa presenta los resultados del test global, lo que permite al usuario determinar con 95% de probabilidad si la varianza empírica coincide con la varianza teórica.
En la Tabla 1 se muestra la salida del programa, en donde se indica que el test global ha fallado, por lo que los resultados del ajuste no son válidos, así que el usuario deberá analizar los resultados determinar las causas.
Como se puede observar en la Tabla 1, el test global falla, esto debido a que puede existir un error grosero en una o varias observaciones, cosa que se comprueba analizando los resultados de la detección de errores groseros que realiza el programa. También, se puede deber a que existe un factor de escala en la red, hecho que se comprueba agregando como incógnita adicional el parámetro de ESCALA, mediante las opciones de cálculo que brinda el programa de ajuste.
Tabla 1 Resultado del test global del ajuste
| RESULTADOS DEL AJUSTE | |||
|---|---|---|---|
| Desviacion estandar a priori (sigma0) | ± 1.0 | ||
| Desviacion estandar a posteriori (So) | ± 0.89 | ||
| Test Global (distribucion de Chi-cuadrado): PASO | |||
| Limite inferior | =0.2158 | ||
| Limite superior | =93.484 | ||
| Valor de prueba t | =23.498 | ||
| Al 95% de probabilidad,la varianza empirica coincide con la varianza teorica | |||
Fuente: Elaboración propia.
El programa también presenta, como parte de los resultados del cálculo, las coordenadas ajustadas de los vértices de la red y su desviación estándar como se muestra en la Tabla 2. Además, el usuario puede corroborar si las coordenadas aproximadas de los puntos están dentro del ámbito diferencial analizando los valores en las columnas DE y DN, presentados en la Tabla 2.
Tabla 2 Coordenadas ajustadas
| COORDENADAS INICIALES | |||||||||||||
| COORDENADAS (m) | |||||||||||||
| NUM. | PUNTO | TIPO | ESTE | NORTE | |||||||||
| 1 | ORATORIO | N | 491777. 72700 | 229788 .10500 | |||||||||
| 2 | NANO | N | 505542. 42800 | 226126. 36200 | |||||||||
| 3 | GALLO | F | 484407. 67100 | 223659. 22200 | |||||||||
| 4 | FILA | F | 515077 .17900 | 207977. 45900 | |||||||||
| 5 | GUARARI | F | 521886 .15600 | 234311. 35800 | |||||||||
| 6 | PALMIRA | F | 495699 .18800 | 2425B0. 63200 | |||||||||
| COORDENADAS APROXIMADAS | COORDENADAS AJUSTADAS | DESV. ESTANDAR(mmJ | |||||||||||
| NUM | PUNTO | TIPO | ESTE | NORTE | DE(MM) | DN (MM) | ESTE | NORTE | SE | SN | |||
| 1 | ORATORIO | N | 49.177.772.700 | 22976B.10500 | +119.47 | +249.43 | 491777.B4647 | 22976B.35443 | 32.5 | 33.3 | |||
| 2 | NANO | N | 505542. 42B00 | 226126. 36200 | +65.9B | -235. 21 | 505542.4939B | 226126 .12679 | 31. B | 40. 9 | |||
Fuente: Elaboración propia.
Las elipses de confianza para cada vértice de la red son determinadas por el programa. Se calculan las dimensiones del semieje mayor y menor, además de la orientación de la elipse como se muestra en la Tabla 3.
Basado en los resultados anteriores, se puede determinar si se cumplen con los criterios técnicos de exactitud definidos en la etapa de diseño de la red geodésica.
Tabla 3 Elipses de confianza
| ELLIPSES DE CONFIANZA AL 95% DE PROBABILIDAD | |||||||||
| COORDENADAS AJUSTADAS | DESV. ESTANDAR (mm) | a | b | alpha | |||||
| NUM. | PUNTO | TIPO | ESTE | NORTE | SE | SN | (mm) | (mm) | alpha (gons) |
| 1 | ORATORIO | N | 491777. 84647 | 229788. 35443 | 32. 54 | 33. 34 | 94. 97 | 49. 87 | 151. 37600 |
| 2 | NANO | N | 505542. 49398 | 226126. 12679 | 31. 81 | 40. 92 | 96. 73 | 69. 91 | 21. 21459 |
Fuente: Elaboración propia.
Posteriormente, se presenta la información relacionada con las observaciones como el valor ajustado, la desviación estándar y su número redundante. En este caso se tienen dos grupos de observaciones, el G1 y G2. Se puede ver también la información relevante sobre el vTPv, redundancia y desviación estándar de cada grupo como se muestra en la Tabla 4.
El programa es capaz de trabajar con grupos de observaciones que son definidos por el usuario basado en un criterio propio. Efectuar el ajuste de esta forma (agrupando las observaciones) permite analizar los resultados para cada grupo definido por separado y en caso de que fuera requerido, efectuar un posterior equilibrio de varianzas según los resultados del grupo de observaciones analizado.
Tabla 4 Información sobre las observaciones de la red
| Grupo (#1): Gl | DISTANCIAS(S) | 10.00 mm+ 3.00 ppm | ||||||
| v1pv: 0.689 | r:l. 77 | So:0.623 | ||||||
| Factor de escala del grupo M=(l+m*l0'-6)= (1+-24.295*10'-6): 0.9999757 (mm/km) | ||||||||
| NUM. | DESDE | HASTA | OBSERVADO (m) | AJUSTADO (m) | V (mm) | p | SIGMA (mm) | r |
| 1 | GALLO | ORATORIO | 9585.46800 | 9585.47266 | +4.66 | 1.00 | 26.33 | 0.05 |
| 2 | FILA | ORATORIO | 31914.39900 | 31914.33164 | -67.36 | 0.10 | 49.92 | 0.66 |
| 3 | GUARARI | ORATORIO | 30445.37800 | 30445.40726 | +29.26 | 0.11 | 43.41 | 0.72 |
| 4 | PALMIRA | ORATORIO | 13379.48500 | 13379.48378 | -1.22 | 0.54 | 35.32 | 0.07 |
| 5 | NANO | ORATORIO | 14243.14700 | 14243.15887 | +11.87 | 0.48 | 32.81 | 0.29 |
| Grupo (#2): G2 | DISTANCIAS(4) | 10.00 mm+ 3.00 ppm | ||||||
| v1pv: 1.661 | r:l. 23 | So: 1.163 | ||||||
| Factor de escala del grupo M=(l+m*l0'-6)= (1+-19.071*10'-6): 0.9999809 (mm/km) | ||||||||
| NUM. | DESDE | HASTA | OBSERVADO (m) | AJUSTADO (m) | V (mm) | p | SIGMA (mm) | r |
| 6 | GALLO | NANO | 21277.8640 | 21277.90150 | +37.50 | 0.22 | 44.67 | 0.39 |
| 7 | FILA | NANO | 20500.47400 | 20500.44707 | -26.93 | 0.24 | 48.84 | 0.22 |
| 8 | GUARARI | NANO | 18278.38000 | 18278.41771 | +37.71 | 0.30 | 42.56 | 0.26 |
| 9 | PALMIRA | NANO | 19173.66000 | 19173.61186 | -48.14 | 0.27 | 41.14 | 0.37 |
Fuente: Elaboración propia
A continuación, se presenta el análisis de detección de errores groseros sobre las observaciones mediante la Tabla 5. Con estos datos es posible determinar si una o varias observaciones están influenciadas por un error grosero. De ser así, el usuario puede tomar la decisión de eliminar la observación afectada o medir de nuevo la observación en el campo con el fin de volver a realizar el ajuste y obtener resultados sin la afectación de errores groseros que distorsionan los resultados obtenidos.
Tabla 5 Detección de errores groseros con el test de Pope
| TEST POPE (95%) tau=l.55 | |||||||
| Grupo (#1): G 1 DISTANCIAS(5) | |||||||
| NUM. | DESDE | HASTA | V (mm) | p | SIGMA (mm) | r | POPE TEST |
| 1 | GALLO | ORATORIO | +4.66 | 1.000 | 26.33 | O.OS | 0.81 |
| 2 | FILA | ORATORIO | -67.36 | 0.100 | 49.92 | 0.66 | 0.98 |
| 3 | GUARARI | ORATORIO | +29.26 | 0.110 | 43.41 | 0.72 | O.43 |
| 4 | PALMIRA | ORATORIO | -1. 22 | 0.542 | 35.32 | 0.07 | 0.13 |
| 5 | NANO | ORATORIO | +11.87 | 0.481 | 32.81 | 0.29 | 0.57 |
| TEST POPE(95%) tau=l.55 | |||||||
| Grupo (#2): G 2 DISTANCIAS(4) | |||||||
| NUM. | DESDE | HASTA | V (mm) | p | SIGMA (mm) | r | POPE TEST |
| 6 | GALLO | NANO | +37.50 | 0.222 | 44.67 | 0.39 | 1.05 |
| 7 | FILA | NANO | -26.93 | 0.239 | 48.84 | 0.22 | 1.05 |
| 8 | GUARARI | NANO | +37.71 | 0.298 | 42.56 | 0.26 | 1. 51 |
| 9 | PALMIRA | NANO | -48.14 | 0.272 | 41.14 | 0.37 | 1. 54 |
Fuente: Elaboración propia
Como se aprecia en la tabla anterior, el programa de ajuste muestra datos como residuo (v), peso (p), desviación estándar (SIGMA) y numero redundante (r), con los que se puede analizar de forma individual a cada observación. Además, se calcula el valor límite para la prueba de errores groseros usando el test de Pope 4, bajo la distribución Tau. Con eso, se determina cual observación está bajo la influenciada de un error grosero.
Adicionalmente, el programa de ajuste también calcula la prueba de errores groseros mediante el test de Baarda 5, como se muestra en la Tabla 6. Se incluye en el cálculo el error mínimo detectable (EMD) que indica la magnitud mínima de un error que puede ser detectada por el test de errores groseros. Asimismo, se determina el número de influencia (Num. Influ.) de cada observación, dato que indica como afecta la observación en los resultados del ajuste.
Tabla 6 Detección de errores groseros con el test de Baarda
| TEST BAARDA DISTRIBUCION FISHER OBSERVACIONES (95%) F=l8. | |||||||||
| Grupo (#1): G1 DISTANCIAS (5) | |||||||||
| NUM. | DESDE | HASTA | V (mm) | p | SIGMA (mm) | r | EMD (mm) | Num. Influ. | BAARDA TEST |
| 1 | GALLO | ORATORIO | +4. 66323 | l. 000 | 26. 33 | 0. 05 | 586.34 | 18. 82 | +0.57 |
| 2 | FILA | ORATORIO | -67. 36153 | 0 .100 | 49. 92 | 0.66 | 487. 05 | 2. 96 | +0. 93 |
| 3 | GUARARI | ORATORIO | +29. 25675 | 0.110 | 43. 41 | 0.72 | 445. 49 | 2. 59 | +0.13 |
| 4 | PALMIRA | ORATORIO | -l. 21925 | 0. 542 | 35.32 | 0.0 | 644. 42 | 15. 03 | +0. 01 |
| 5 | NANO | ORATORIO | +11.87045 | 0. 481 | 32. 81 | 0.29 | 336. 35 | 6. 48 | +0. 24 |
| TEST BAARDA DISTRIBUCION FISHER OBSERVACIONES (95%) F=l8. 5 | |||||||||
| Grupo (#2): G2 DISTANCIAS (4) | |||||||||
| NUM. | DESDE | HASTA | V (mm) | p | SIGMA (mm) | r | EMD (mm) | Num. Influ. | BAARDA TEST |
| 6 | GALLO | NANO | +37. 49609 | 0.222 | 44. 67 | 0.39 | 424. 25 | 5.13 | +l.16 |
| 7 | FILA | NANO | -26. 93129 | 0. 239 | 48. 84 | 0.22 | 550. 22 | 7. 82 | +1.17 |
| 8 | GUARARI | NANO | +37. 71393 | 0. 298 | 42. 56 | 0.26 | 451. 83 | 6. 99 | +6. 39 |
| 9 | PALMIRA | NANO | -48 .13973 | 0.272 | 41.14 | 0.37 | 395. 57 | 5. 39 | +7. 53 |
Fuente: Elaboración propia
Esta información permite mejorar el diseño de la red, de tal forma que se eliminan observaciones cuyo EMD sea muy alto y que tengan una influencia muy alta en los resultados del ajuste. El número redundante (r) permite determinar qué tan controlada esta una observación, es decir la capacidad de la red para detectar un error grosero, su valor debe estar en el rango de 0 a 1, indicando el valor de r = 1 que la observación está completamente controlada y r = 0 una observación sin control, es decir que se puede cometer un error de magnitud infinita en la observación y no ser detectado.
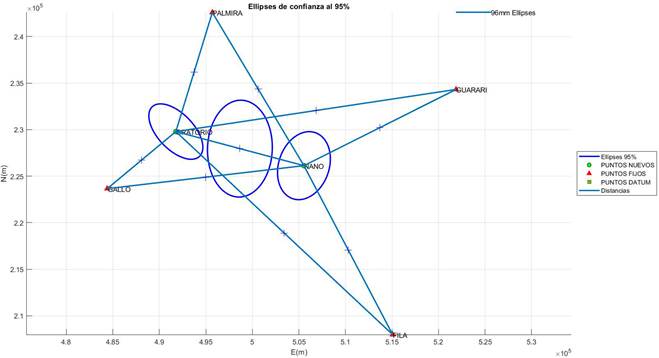
El programa desarrollado presenta de forma gráfica la configuración de la red geodésica ajustada, a la vez que muestra las elipses relativas y de confianza, las observaciones y la distribución de los vértices que conforman la red, como se muestra en la Figura 1.
Discusión
En este artículo se han presentado los resultados de una actividad de investigación de la ETCG, la cual desarrolló un sistema informático para el ajuste de redes geodésicas bajo una visión de software libre y abierto. Se espera que el sistema permita mejorar el proceso de enseñanza y aprendizaje en los diferentes cursos de la carrera de Topografía, en los que se requiera realizar el ajuste de redes geodésicas en una y dos dimensiones, así como también aportar al desarrollo de proyectos de investigación en donde se necesite un sistema con estas funcionalidades. Cabe destacar que como ventaja adicional se logró que la Escuela de Topografía no tenga que invertir en la compra de licencias de ese tipo de software, pues ahora se cuenta con una herramienta propia. El programa resultante es capaz de brindar todos los resultados necesarios para el ajuste de redes geodésicas medidas con métodos convencionales y su análisis, de forma comparable con cualquier programa comercial licenciado.

