











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
Los vehículos de carga eléctricos son un reto pendiente para la sociedad actual, y un área en la que aún existe un amplio espacio para la mejora [1]. La autonomía es una de las necesidades más urgentes en los vehículos de combustibles alternativos y en su búsqueda se pueden distinguir tres principales rutas de investigación [2]: métodos de almacenamiento de mayor capacidad, conversión de energía más eficiente y la integración sistemas de restitución de energía.
Múltiples esfuerzos se han hecho en la última década para lograr la optimización en la conversión de energía y la búsqueda de la autonomía de un vehículo de carga. Por ejemplo, sistemas de planificación de carga y descarga de la energía eléctrica almacenada en función del análisis de la ruta planeada [3], sistemas de intercambio de potencia eléctrica y mecánica [4], regeneración eléctrica a través torque de realineamiento de la dirección [5] o a través de las vibraciones mecánicas que se producen en el vehículo [6].
Las fuerzas aerodinámicas también afectan el desempeño del vehículo en diferentes formas [7]. En la actualidad las empresas trabajan mejorando los diseños de lo exteriores de los vehículos para reducir la fuerza de arrastre y así reducir la energía en pérdidas aerodinámicas. El coeficiente de arrastre (C d ) es el indicador por excelencia en este tipo en estudios, y ha sido probado ya en múltiples ocasiones que la modificación del perfil de la cabina, la separación del remolque respecto al tracto camión, y la diferencia de alturas entre la cabina del tracto camión y el techo del remolque son variables de relevancia para la modificación de este parámetro [8].
Por otra parte, también existen ya investigaciones que buscan aprovechar el efecto aerodinámico de la interacción del vehículo con el medio. Por ejemplo en 2015 se realizó una estimación de recurso energético que podía obtener de las pérdidas aerodinámicas en las autopistas, mediante la utilización de un dispositivo instalado en las carreteras [9].
Considerando la conclusión del artículo de Moribato, Borri y Vitaliani [9] en la que se estima que es posible generar hasta 14 kW en una autopista a base de las corrientes generadas por los vehículos de carga, y lo denotado por Allan [8] y confirmado por Osth y Krajnovic [7], sobre el la influencia del diseño de la cabina en la resistencia al arrastre, se plantea que un modelo que conjugue ambos fenómenos para transformar la parte de la energía generada por el arrastre en el entorno, en energía eléctrica a bordo del vehículo, considerando en él, la relación entre potencial energético y arrastre después de las modificaciones al diseño original.
Dado que la mayor parte del arrastre sobre los vehículos se debe a la fuerza de presión [7], y que la forma de la cabina influencia el arrastre total del vehículo; se plantea modificar el diseño de la cabina, tomando en cuenta que se trabaja sobre un vehículo completamente eléctrico o híbrido. Se parte del hecho de que este carece de un motor de combustión interna, o que sus elementos puedan reacomodarse para permitir un espacio frontal libre que se pueda aprovechar para la colocación de un ducto, cuya entrada se encuentra en la parte frontal del camión y que guiará el fluido a través del volumen del tracto camión hasta dos salidas laterales, pasando en el camino por aerogeneradores de imanes permanentes instalados en el interior de los ductos. Se espera con esto obtener un espacio en donde la energía cinética del aire en flujo se pueda convertir en energía eléctrica, creando así un sistema que permita regenerar la carga durante el descenso de pendientes y en momentos de desaceleración.
El presente trabajo tiene como objetivo evaluar, utilizando del método RANS, los efectos de la modificación planteada en coeficiente de arrastre del vehículo y la potencia por unidad de área del flujo en el ducto, y finalmente determinar la factibilidad del sistema planteado.
La sección siguiente inicia describiendo el método CFD utilizado para dar solución a los distintos planteamientos sobre el coeficiente de arrastre y obtener la información necesaria para estimar el potencial eólico. Seguidamente se muestra el procedimiento para el cálculo del potencial del sistema planteado.
En la sección 3 se muestran los resultados obtenidos de los cálculos y en análisis RANS, para las distintas variaciones al tractocamión planteadas, mientras que en la sección 4 se ejecuta un análisis de los resultados y una estimación de la factibilidad del sistema. Finalmente en la sección 5 se presentan las conclusiones resultantes del estudio.
Metodología
Simulación CFD
Para la simulación de arrastre en el vehículo se hizo uso de la herramienta Comsol® Multiphysics (versión 5.0.0.243) para simular, mediante un modelo a escala, las condiciones en la que operaria el conjunto tractocamión-remolque con las modificaciones planteadas.
Se realizarán pruebas a distintas velocidades simulando distintas condiciones de operación del vehículo. Dado que se trata de un modelo a escala, se utiliza el número de Reynolds (Re) para escalar los fenómenos en la simulación.
 (1)
(1)
En el Cuadro 1 se muestra la velocidad en operación del vehículo, el número de Reynolds y la velocidad para la simulación del modelo a escala, obtenidos a partir de la ecuación (1),h con como longitud característica, y tomando las propiedades del aire (ρ y μ ) a 1 atm y 25 °C.
Descripción del modelo
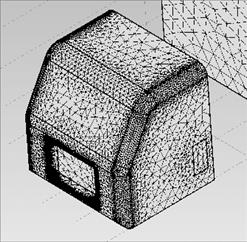
El modelo de la simulación consta de dos bloques. El primero es un prisma rectangular que representa de manera simplificada el remolque; y el segundo, un prisma rectangular con un corte diagonal en la parte frontal que representa, de manera simplificada también, la cabina del vehículo.
Cuadro 1 Escala de la velocidad para la simulación.
| Velocidad de operación | [47]Numero de Reynolds | [48]Velocidad en modelo |
|---|---|---|
| (km/h) | [51] [52](m/s) | |
| 10 | [55]4,43 x 104 | [56]1,1111 |
| 20 | [59]8,87 x 104 | [60]2,2222 |
| 30 | [63]1,33 x 105 | [64]3,3333 |
| 40 | [67]1,77 x 105 | [68]4,4444 |
| 50 | [71]2,22 x 105 | [72]5,5556 |
| 60 | [75]2,66 x 105 | [76]6,6667 |
| 70 | [79]3,10 x 105 | [80]7,7778 |
| 80 | [83]3,55 x 105 | [84]8,8889 |
Es importante recordar que el objetivo del presente documento es evaluar las variaciones en el comportamiento en base a los cambios en el diseño del ducto mencionado en la sección anterior, y no con respecto a las relaciones geométricas entre el tracto camión y el remolque. Es por esta razón que el modelo no sigue las relaciones geométrica ni la parametrización determinada por Allan [8] y utilizada por Östh [7], para las dimensiones del conjunto tractocamión-remolque. En su lugar, estas dimensiones resultan de escalar 1:4 y simplificar las dimensiones del tractocamión Volvo® FMX-SLP [10] y el remolque YRC 45ft Wedge trailer [11].
Para los efectos de este documento, se toma la altura frontal de la cabina como la longitud característica del conjunto. Esto es debido a que esta dimensión es la más variable (en comparación a las otras dimensiones que forman el área frontal, tanto del remolque como del tractocamión) entre los distintos fabricantes de camiones, por lo que describe mejor la geometría de cada vehículo.
El modelo descrito anteriormente se denomina ahora modelo base, debido a que será la referencia respecto a la cual se comparan los resultados de la implementación del ducto. Partiendo del modelo base, se implementa el ducto en los modelos prototipo.
El primer aspecto considerable en el diseño es la necesidad de disminuir las posibilidades de desprendimiento de la capa límite durante todo el trayecto del aire sobre ducto. Debido a que según la definición de Mott [12], el ducto no aplica para el estudio como flujo de Fanno (por su área transversal y longitud), se procede según lo encontrado por Allan y Östh, y se efectúa perfiles curvos para dirigir el fluido por el ducto.
La fuerza de arrastre está descrita [12], según la ecuación (2), y se nota la influencia en ella de 3 variables: presión, esfuerzo cortante y área. Según lo encontrado por González [13], la influencia de la fricción en la fuerza de arrastre en este tipo de vehículos alcanza el 10% del arrastre total, mientras que el restante 90% se debe al arrastre por presión. Otro aspecto relevante de acuerdo con la ecuación (2), es que el ángulo θ entre la velocidad de entrada del fluido y el vector normal exterior a la superficie de choque, es un actor importante tanto por fricción como por presión.
 (2)
(2)
Dado que tanto el arrastre por fricción como por presión dependen del área (paralela y normal respectivamente) presente en la geometría del vehículo y que existe una relación del ángulo θ respecto al ángulo β (dirección de salida del fluido); se decide realizar la parametrización del modelo en función de la altura a de la entrada del ducto y del ángulo β de salida del aire. Las dimensiones y detalles del túnel en función a estas dos variables se pueden apreciar en la Figura 4.
Se expresa entonces el coeficiente adimensional a/h, (con h cómo la longitud característica), como la relación que permite generalizar los resultados de la simulación. Debe notarse que debido a las dimensiones del vehículo, valor practico máximo para la relación es a/h 0,5; y el ángulo β por límite práctico, debe está comprendido entre 0° y 90°.
Nótese que los parámetros h,w y r, son constantes resultantes de la escala sobre la geometría original, sin embargo, la dimensión i, es dependiente de los parámetros a y β, tal que:
 (3)
(3)
En la Figura 4 se observa que el parámetro i debe cumplir con 0 < i < r, por lo que con esto y con las restricciones para a y β, se forma Sistema de inecuaciones de primer grado, que construyen una región de viabilidad para la relación entre a y β.
0 < a < 0,5h
0 < β < π (4)
Se debe notar que la primera restricción de la ecuación se cumple para todo valor del intervalo a y β. Por otra parte, la segunda condición forma un plano (Figura 5) bajo el cual se restringen las combinaciones de a y β, no solo para el parámetro i, sino para el planteamiento en general.
Nótese que el área de salida del ducto definida como A s = a2 es un 37,5% menor, para cualquier prototipo, que el área de entrada al ducto definida como: A e = 1,6a2. Con esto se busca acelerar el fluido a través de su paso por el ducto.
Se analiza el efecto de la variación de los parámetros independiente y simultáneamente, por tanto dadas las restricciones para los parámetros del modelo, se establecen las combinaciones de los mismos para los diferentes prototipos a analizar en las simulaciones. Estas combinaciones se muestran en el Cuadro 1.
Cuadro 1 Prototipos de la Prueba.
| Prototipo | [124]ah | [125]β | [126]a |
|---|---|---|---|
| (°) | [131](m) | ||
| 1 | [134]0,26 | [135]45 | [136]0,1524 |
| 2 | [139]0,26 | [140]40 | [141]0,1524 |
| 3 | [144]0,26 | [145]35 | [146]0,1524 |
| 4 | [149]0,26 | [150]50 | [151]0,1524 |
| 5 | [154]0,26 | [155]55 | [156]0,1524 |
| 6 | [159]0,20 | [160]45 | [161]0,1178 |
| 7 | [164]0,20 | [165]40 | [166]0,1178 |
| 8 | [169]0,20 | [170]35 | [171]0,1178 |
| 9 | [174]0,20 | [175]50 | [176]0,1178 |
| 10 | [179]0,20 | [180]55 | [181]0,1178 |
| 11 | [184]0,32 | [185]45 | [186]0,1884 |
| 12 | [189]0,32 | [190]40 | [191]0,1884 |
| 13 | [194]0,32 | [195]35 | [196]0,1884 |
| 14 | [199]0,32 | [200]50 | [201]0,1884 |
| 15 | [204]0,32 | [205]55 | [206]0,1884 |
Configuración numérica
Ecuaciones gobernantes
La ecuaciones gobernantes para el método RANS son la ecuación de para flujo incompresible de Navier-Stokes con Reynolds promedio (5) y continuidad (9). Estas ecuaciones promedian los campos de velocidad y la presión en el tiempo.
 (5)
(5)
En la ecuación (4), los términos a la izquierda del igual representa la acción de las fuerzas internas; el primero a la derecha representa las fuerzas de presión, mientras que el segundo las viscosas y el tercero las externas. El Término U y P representan el promedio en el tiempo de la velocidad y presión respectivamente [14].
Al observar los valores del número de Reynolds (Cuadro 1) para la simulación, se nota que le flujo en todos los casos es turbulento y por esta razón se utiliza el modelo k - ε del método RANS
(10) para el análisis del sistema. Este modelo resuelve dos ecuaciones extra para el transporte de energía cinética turbulenta k (6) y la disipación turbulenta ε (11).
 (6)
(6)
En la ecuación μ T (6), es la viscosidad z Turbulenta de remolino, que representa los efectos de las fluctuaciones de velocidad a pequeña escala [14] y dependientes del tiempo; y que se define como lo muestra la ecuación (7).
 (7)
(7)
Por otra parte P k el término representa el tensor de esfuerzos para la malla de modelado [7] y se define como lo muestra a continuación la ecuación (8):
 (8)
(8)
Las constantes adimensionales σ k , σ∈, C e1 , C e2 y están definidas para el modelo [15]. Su definición o valor se muestra en el Cuadro 2.
 (9)
(9)
 (10)
(10)
 (11)
(11)
Cuadro 2 Constantes del modelo k - ε.
| Constate | [228]Valor (adimensional) |
|---|---|
| σk | [231]ρ |
| σ∈ | [234]1.30 · ρ |
| Cμ | [237]

|
| Ce1 | [240]0,69 · ρ |
| Ce2 | [243]0,52 · ρ |
Tamaño de malla
En el presente trabajo utilizó el software Comsol® Multiphysics (versión 5.0.0.243), para generar una malla tetraédrica tanto en el modelo como en el volumen de control. Con el objetivo de verificar la independencia de los resultados, se evaluaron para el prototipo 1 cinco tamaños de malla diferente1: coarse (7 723 elementos y 6 828 grados de libertad), normal (13 258 elementos y 11 700 grados de libertad), fine (20 275 elementos y 16 770 grados de libertad), finer (34 899 elementos y 29 424 grados de libertad) y extra fine (75 167 elementos y 64 458 grados de libertad). Un vez que se verificó que el tamaño de la malla no afectaba lo resultados, se seleccionó la malla adecuada para los catorce prototipos restantes.
Condiciones de frontera
Se establecieron cuatro condiciones de frontera para los modelos. Para la cara frontal del volumen de control se establece la condición de entrada, y se le asigna al fluido una velocidad normal de ingreso para cada caso, según el Cuadro 1.
Para la cara posterior se le asigna la función de salida, y se establece la presión barométrica del fluido en ese punto como 0 Pa. Por otra parte, para las secciones superior, y laterales, se establece la condición de simetría, que define no penetración ni fuga de esfuerzos cortantes en la superficie.
Para las superficies del tractocamión y el remolque, se define la condición de barrera, que implica no deslizamiento y no penetración. Se debe mencionar que la superficie inferior del volumen de control se define como barrera en movimiento, con condición de no deslizamiento y velocidad igual a la velocidad de entrada en la cara frontal, debido a que este trabajo emula la operación de un vehículo que transita sobre una carretera, y no en un túnel de viento.
Potencia por unidad de área
La potencia por unidad de área para la energía cinética del viento está dada, de forma general, por la ecuación (12), donde ρ y V son la densidad del aire y velocidad en el área normal de entrada respectivamente; A es el área en estudio (área que barren las aspas del mecanismo de transformación [16]) y P la potencia. En esta ecuación se aprecia que la potencia es directamente proporcional al cubo de la velocidad [16]. Esto evidencia que el modelo que brinde una mayor potencia es aquel que admita una mayor velocidad del aire dentro de los ductos.
 (12)
(12)
Para el caso específico de modelo en estudio, se tiene la posibilidad de determinar la potencia por unidad de área ya sea en el ducto de entrada, o ambos ductos laterales. Sin embargo, dada la relación presentada anteriormente, en donde se mencionó que el área de salida del ducto es menor que la entrada, se espera que el fluido se acelere y tenga velocidades mayores en los ductos laterales en comparación con la velocidad en el ducto de entrada.
Dado que el modelo en estudio es simétrico respecto a eje vertical del camión, se tiene que el fenómeno debe comportarse de manera muy similar en ambos ductos del vehículo. Por tanto, se tiene que, para el fenómeno en estudio la ecuación (12) puede reescribirse como lo muestra (13), donde VDL, es la velocidad en los ductos laterales.
 (13)
(13)
Resultados
Para el simplificar el manejo de los datos resultantes de cada uno de las simulaciones elaboradas, se propone la siguiente codificación de las series de datos: DD-PP-MM, en donde los dos primeros elementos corresponden a el identificador del dato, los segundos dos describen el prototipo (siendo PB el diseño Base) y los últimos dos el tipo de mallado utilizado.
Dado que en ningún caso de análisis de datos el número de estos supera los quince elementos, se estudian los datos como no agrupados. Para cada conjunto de datos en análisis se tomaron las medidas de tendencia central y las de dispersión como criterios de selección de los datos representativos del conjunto.
Cuadro 3 Descripción del Valor DD
| COD | [272]Descripción |
| CD | [275]Coeficiente de Arrastre |
| CP | [278]Coeficiente de Arrastre por presión |
| CF | [281]Coeficiente de arrastre por fricción |
| FD | [284]Fuerza de Arrastre en el modelo |
| CV | [287]Coeficiente de Velocidad |
| PA | [290]Potencia por unidad de área |
Cuadro 4 Descripción del parámetro MM.
| COD | [295]Descripción |
|---|---|
| CR | [298]Malla Coarse |
| MN | [301]Malla Normal |
| FI | [304]Malla Fine |
| FR | [307]Malla Finer |
| EF | [310]Malla Extra Fine |
Figura 7 Fuerza de arrastre en función de la velocidad para diferentes tipos de mallado. Elaboración propia
Comparativa de mallas
El coeficiente de arrastre, valor fundamental del presente estudio, es un dato indirecto obtenido a partir de la fuerza de arrastre sobre el vehículo. Es por esta razón que la se analiza la dependencia de la malla en función de los datos obtenidos de la simulación para la fuerza de arrastre.
La Figura 7 muestra la comparación de la fuerza de arrastre en función de la velocidad simulada para los diferentes tamaños de mallado, y está definida de acuerdo con la ecuación (2).
El Cuadro 5 muestra el tiempo de simulación para cada mallado diferente así como la varianza entre los coeficientes de arrastres obtenidos para cada subconjunto de datos.
Se observa que para los tamaños de malla finer y extra finer el comportamiento de la fuerza de arrastre es aproximadamente convergente (ver Gráfico 1), y que la varianza en ambos casos es la más baja, sin embargo se nota también que el tiempo de cálculo es considerablemente más alto para la malla finer que para la extra fine, a pesar de obtener valores de varianza similares.
Cuadro 5 Variación y tiempo de simulación para distintos tamaños de mallado.
| Conjunto | [324]Varianza (%) | [325]Tiempo (s) |
|---|---|---|
| CD-01-CR | [328]0,0340% | [329]121 |
| CD-01-NR | [332]0,0096% | [333]111 |
| CD-01-FI | [336]0,0011% | [337]113 |
| CD-01-FR | [340]0,0001% | [341]324 |
| CD-01-EF | [344]0,0001% | [345]456 |
Arrastre
Debido a que cada prototipo brindó ocho valores de coeficiente de, arrastre calculados mediante la ecuación (14), resultante de las simulaciones a ocho velocidades diferentes, se aplicó un análisis estadístico a los datos.
 (14)
(14)
En la ecuación anterior F D , A F y V 2 , son la fuerza de arrastre, el área proyectada frontal del prototipo y la velocidad normal del viento a la entrada del volumen de control respectivamente [12].
Dado que los datos son tan próximos entre sí, y que no se repiten valores, se descartó la media aritmética o la moda como criterio determinante para el arrastre representativo. En su lugar, se utilizó la mediana, que representa el punto en donde se agrupan el 50% de los valores. El Cuadro 6 muestra la los valores de coeficiente de arrastre obtenidos mediante la simulación para cada prototipo.
Se observa que el coeficiente de arrastres del vehículo con ductos, es siempre mayor al coeficiente de arrastre sobre el vehículo en condiciones originales (Obsérvese Cuadro 6). También se observa la tendencia de aumento en el coeficiente de arrastre con forme se aumenta el ángulo β, así como una tendencia oscilante en cada una de las relaciones a/h.
La Figura 8 muestra la relación de β con el coeficiente de arrastre, proyectando una tendencia polinómica de segundo orden.
Buscando un modelo de relación para los datos de coeficiente de arrastre en función de los parámetros a/h y β, se emplea la técnica de regresión simbólica; una aplicación de la programación genética, que mediante la combinación inteligente y sistemática de funciones sinusoidales, valor absoluto, división modular, truncamiento, redondeos, polinomios de grado N, raíces, entre otros; busca funciones que se ajusten a una serie de puntos dados [17]. Esta regresión se realizó mediante el software Eurequa ® (versión 1.24.0) y se le brindaron los datos de entrada del Cuadro 6 (β en radianaes). El modelo con mejor ajuste obtenido contó de 9 coeficientes y brindó un coeficiente de R2=0,9967 aproximadamente, con un error máximo 0,02132. Sin embargo la complejidad del modelo resultó muy elevada, y poco comprensible.
Cuadro 6 Coeficiente de Arrastre y varianza para los distintos prototipos.
| Dato | [359]a/h | [360]Β (°) | [361]CD | [362]- |
|---|---|---|---|---|
| Base | [365]- | [366]- | [367]8,1449 | [368]0,0051 |
| CD-01-FR | [371]0,26 | [372]45 | [373]8,7957 | [374]0,0010 |
| CD-02-FR | [377]0,26 | [378]40 | [379]8,6328 | [380]0,0009 |
| CD-03-FR | [383]0,26 | [384]35 | [385]8,6372 | [386]0,0010 |
| CD-04-FR | [389]0,26 | [390]50 | [391]8,7662 | [392]0,0039 |
| CD-05-FR | [395]0,26 | [396]55 | [397]8,8969 | [398]0,0017 |
| CD-06-FR | [401]0,2 | [402]45 | [403]8,5726 | [404]0,0029 |
| CD-07-FR | [407]0,2 | [408]40 | [409]8,5846 | [410]0,0028 |
| CD-08-FR | [413]0,2 | [414]35 | [415]8,6670 | [416]0,0011 |
| CD-09-FR | [419]0,2 | [420]50 | [421]8,7426 | [422]0,0024 |
| CD-10-FR | [425]0,2 | [426]55 | [427]8,7407 | [428]0,0008 |
| CD-11-FR | [431]0,32 | [432]45 | [433]8,8411 | [434]0,0014 |
| CD-12-FR | [437]0,32 | [438]40 | [439]8,5544 | [440]0,0009 |
| CD-13-FR | [443]0,32 | [444]35 | [445]8,4312 | [446]0,0071 |
| CD-14-FR | [449]0,32 | [450]50 | [451]8,8876 | [452]0,0015 |
| CD-15-FR | [455]0,32 | [456]55 | [457]9,2362 | [458]0,0013 |
No obstante se observó que otro de los modelos obtenidos, con solo 4 coeficientes, describe el fenómeno con un coeficiente de R2=0,9000, lo que, según Moreno Parra2, es aceptable considerando la simplicidad que presenta. El modelo descrito se presenta en la ecuación (15).
 (15)
(15)
La Figura 9 muestra el ajuste del modelo respecto a los datos de entrada brindados para los 15 prototipos, mientras en el Cuadro 7 se muestran los datos de ajuste de dicho modelo.
Cuadro 7 Datos de ajuste del modelo 19.
| Dato | [473]Valor |
|---|---|
| Coeficientes | [476]4 |
| R2 | [479]0,9000 |
| Error máximo | [482]0,1014 |
| Coeficiente de Correlacion | [485]0,9487 |
Observando la ecuación (15) y considerando que según los restricciones de diseño, 0<a/h<0,5, como de β (en radianes) se nota que el coeficiente de arrastre aumenta para combinaciones de ambos factores grandes. Además cuando β>1(aproximadamente entre 55° y 90°)3, el arrastre sufre un incremento más pronunciado, como en el caso del prototipo 15. También se nota que la variable β es más determinante en la ecuación (15), pues está en dos términos de signos opuesto, pero multiplicados por coeficientes de valores distantes encada caso.
Densidad energética
Al realizar las mediciones de velocidad para los distintos prototipos se observó que la velocidad en los ductos, en cada uno de los puntos de medición, varió linealmente con la velocidad simulada del vehículo, esto se evidencia en Gráfico 3, Lo anterior hace posible determinar un coeficiente de velocidad (CV) para cada sección del ducto, en cada uno de los modelos.
 (16)
(16)
La ecuación (16) define al Coeficiente de velocidad como la velocidad del viento en el punto evaluado (V p ), entre la velocidad del vehículo (V ∞ ).
La Figura 10 muestra el gráfico de la velocidad y los puntos donde se tomaron los datos. Los puntos A y C representan la ubicación de las superficies en donde se promedió la velocidad de salida y entrada a los ductos laterales, respectivamente; el B presenta la ubicación del volumen de control donde promedio la velocidad en los ductos de salida. Finalmente E y D representan la ubicación de la superficie de control donde se promedió la velocidad de entrada, y el promedio de velocidad a través del túnel principal.
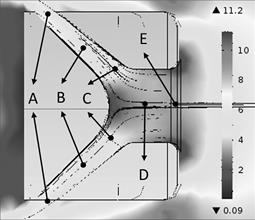
Al tener un coeficiente de velocidades para cada sección del ducto de un modelo, es posible crear el perfil de variación de la velocidad del viento a través del ducto para cada modelo. La Figura 12 muestra cómo varia el coeficiente de velocidad a través de ducto para los diferentes prototipos simulados.
Se observa que el coeficiente de velocidad, para todos los modelos, se incrementa cuando el fluido ingresa a los ductos laterales, y que alcanza un punto máximo en el trascurso del mismo, para experimentar un descenso en la salida del sistema.
Dicho lo anterior, y considerando lo señalado respecto a la ecuación (13), y lo observado en la Figura 10, se tiene que el punto de aprovechamiento máximo de potencia se encuentra en la sección intermedia de los ductos laterales.
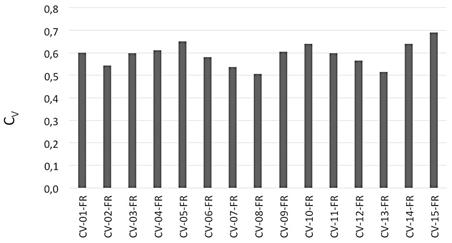
Se observa en la Figura 13 que lo prototipos 04, 10 y 15 son lo que presentan un mayor coeficiente de velocidad. Estos prototipos tiene en común un ángulo β>50°. Por su parte, los prototipos 8 y 13, son los que cuentan con un menor coeficiente de velocidad. Ambos tienen un β=35°.
Se tiene entonces que la potencia media por unidad de área de la energía cinética en los ductos de salida del vehículo está descrita por la ecuación 3. En donde V DS , es la velocidad del fluido a través del fluido en un punto medio del ducto lateral.
 (17)
(17)
Se tiene que la ecuación (17) se puede representar como lo muestra la ecuación (18), en donde utilizando las unidades del sistema internacional, la potencia por unidad de área estaría dada en watts por metro cuadrado (w/m2).
 (18)
(18)
Al evaluar la los distintos valores de CV de los obtenidos para distintas velocidades, es posible determinar la potencia por unidad de área para vehículos de escala real. La Figura 14 muestra esta relación para las distintas configuraciones simuladas en este estudio.
Figura 14 Potencia por unidad de área en función de la velocidad del vehículo para las distintas configuraciones.
Dado que la potencia por unidad de área es proporcional al producto del coeficiente de velocidad y la velocidad del vehículo, se busca un modelo de relación para los datos de coeficiente de velocidad con los parámetros a/h y β, de forma similar a como se realizó para el coeficiente de arrastre. El modelo con mejor ajuste obtenido contó de 12 coeficientes y brindó un coeficiente de R2=0,9866 aproximadamente, con un error máximo 0,0163. Sin embargo la complejidad del modelo resultó también muy elevada, y poco comprensible.
No obstante, en este caso se observó que uno de los modelos, con solo 3 coeficientes, presentó baja complejidad y similitud con lo denotado en (15); con un coeficiente de correlación de R2=0,8413. El modelo se presenta en la ecuación (19).
 (19)
(19)
La Figura 15 muestra el ajuste del modelo respecto a los datos de entrada brindados para los 15 prototipos, mientras en la Cuadro 8 se muestran los datos de ajuste de dicho modelo.
Cuadro 8 Datos de ajuste del modelo 19.
| Dato | [531]Valor |
| Coeficientes | [534]3 |
| R2 | [537]0,8413 |
| Error máximo | [540]0,0605 |
| Coeficiente de Correlacion | [543]0,9173 |
Observando la ecuación (19) y considerando que según los restricciones de diseño, se nota que el coeficiente de velocidad tiene una componente que es proporcional al cuadrado de β, y que ha valores más altos de a/h, las velocidades serán mayores, pero no drásticamente.
Discusión
Observando los datos de la Cuadro 6 se puede apreciar que para todos los prototipos el coeficiente de arrastre aumentó, desde un 3,52% hasta un 13,40%, con solo la colocación del ducto. Se infiere entonces, que la apertura frontal, base de la implementación de los ductos, aumentó la resistencia aerodinámica. Este dato es fundamental para comprender el impacto sobre el consumo de energía, y por ende sobre el cumplimiento del objetivo final, un sistema aumente la autonomía energética del vehículo.
Si se toma el aumento del coeficiente de arrastre y se analiza en momentos de aceleración en el vehículo, se tiene que de acuerdo con lo descrito por Allan [8], Osth y Krajnovic [7], el consumo de energía será mayor en relación al modelo base. Sin embargo, si se analiza el vehículo en condiciones de desaceleración, momento en que se plantea la entrada en funcionamiento del sistema, se tiene que el incremento en la resistencia aerodinámica favorece el rendimiento del vehículo, pues si se aumenta la resistencia aerodinámica, disminuye, aunque en poca medida, la energía requerida en el frenado.
La empresa Freightliner, en el programa SuperTruck [18] trabaja en el concepto de un vehículo de carga, que entre muchas otras características, posee una rejilla en la parte frontal del vehículo, que permite o no la entrada de aire al intercambiador de calor frontal. La idea del sistema surge a partir de un requerimiento muy similar a lo planteado en el párrafo anterior, el paso de flujo hacia el intercambiador en momentos en los que no es necesario, aumenta el arrastre aerodinámico [19]. Este mismo principio podría ser aplicado para permitir el flujo en el ductos de los prototipos planteados solo en condiciones de desaceleración.
Por otra parte se observa en el gráfico 6, que los valores de potencia por unida de área resultan muy bajos, en el rango de los miliwatts. Se debe considerar que el área disponible para el aprovechamiento energético, involucra la sección transversal de ambos ductos laterales, es decir 62,5% del área de entrada. Ya que el área de entrada se define como 1,6a 2, y que el valor límite de a ≈ 0,5, se tiene que para un vehículo como el que se escaló para el presente trabajo, el área máxima aprovechable sería de alrededor de 1,4 m2. Esto implica que la potencia de la energía cinética del viento a través del túnel que se puede esperar estaría alrededor de los 43,5 mW a 80 km/h. Considerando la referencia del fabricante alemán Terberg, que posee un tractocamión eléctrico con motor de 202KW [20] y tomando en que para convertir la energía cinética en eléctrica se deberá utilizar un dispositivo con una eficiencia teórica máxima dada por un coeficiente de Betz del 59% [16] aproximadamente; se tiene que las configuraciones planteadas presentan una capacidad muy baja de restitución de energía al sistema.
Al estudiar la relación entre los modelos planteados tanto para el coeficiente de arrastre C D , como el de velocidad C D , se aprecia que poseen una estructura muy similar, en donde se puede resaltar en ambas comparten un término k(a/h) β2, en adición, y un término restando, dependiente de (a/h) elevado a una potencia. Valores altos de la relación (a/h) disminuirán el coeficiente de velocidad y el de arrastre, siendo más significativo el cambio en el coeficiente de velocidad, dada la potencia de cuarto grado presente y los valores de las constantes en cada término.
Por su parte, la variable β se presenta en dos términos el coeficiente de arrastre, con un aporte positivo al coeficiente de arrastre para valores de (a/h) altos, y negativo, para valores de (a/h) bajos. En el coeficiente de velocidad, se tiene que el aporte es proporcional al ángulo, pues solo se presenta en un término de suma, con una potencia al cuadrado, Recordando que en la ecuación (19), el parámetro β se expresa en radianes, y dado que la potencia de una fracción será un valor menor que la base, se tiene que los valores de mayor oportunidad para β serán mayor a un radian, es decir β > 57,3º. Dicho lo anterior, se tiene que las mejores combinaciones posibles, según los modelos (19) y (15), descritos en el presente trabajo, son aquellas con bajos valores de la relación (a/h), y valores de β > 57,3º.
Se debe recordar que los modelos planteados en este trabajo, como lo evidencia su coeficiente de correlación R2, siguen tendencia de los datos, y no se enfocan en los valores puntuales, lo que implica que pueden presentarse diferencias en comportamiento para valores de (a/h), y β intermedios, que no definen un comportamiento característico específico.
Conclusiones
Al final del desarrollo del trabajo se encontró que, bajo las condiciones estudiadas, para las geometrías propuestas existe una capacidad energética en el flujo de aire a través de los ductos. Sin embargo, se encontró también que potencia máxima, aprovechable mediante un sistema eólico, que los diseños de túneles propuestos pueden brindar, está en rangos muy bajos en comparación con la consumo que presentan los vehículos eléctricos en la actualidad.
Se encontró también que la implementación de los túneles, con las dimensiones especificadas en el Cuadro 1, implicó un aumento en el coeficiente de arrastre respecto al modelo original, que se torna favorable cuando el vehículo se encuentra en desaceleración, pero contraproducente cuando se encuentra en aceleración, lo que implica que, para los prototipos planteados, se debe restringir la entrada de aire al sistema en condiciones de aceleración.
Se definió un coeficiente de velocidad C v , factor determinante en la potencia por unidad de área, en función de (a/h), y β y que permite determinar la velocidad del fluido en los ductos. Del mismo modo se estableció un modelo que expresa el coeficiente de arrastre d C v también como función de (a/h), y β, y que podría ser implementado en el desarrollo de trabajos futuros.
Finalmente, se determinó a través de los modelos planteados, que la mejor combinación para obtener valores más altos de C v , y por lo tanto de potencia por unidad de área, es aquella en donde se tienen bajos valores de la relación (a/h), y valores de β > 57,3º.

