Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
La automatización de los procesos industriales se puede entender como una actividad tecnológica que busca sustituir, en una actividad determinada, al operador humano por dispositivos mecánicos o electrónicos (Moreno, 2001). El modelo estructural general de las soluciones de automatización es similar al de la Figura 1, en la cual se muestra que para la correcta automatización del proceso es necesario: a) comprender el proceso productivo en detalle, b) definir las variables del proceso por medir y controlar, y c) definir la tecnología de control que se encargará de capturar, procesar y manipular las señales desde los sensores y actuadores. Además, el dispositivo lógico de control debe poseer capacidades de comunicación y diálogo con otras unidades u operarios.
La implementación del dispositivo lógico de control se puede realizar en varias tecnologías, entre ellas los circuitos de relés, circuitos operacionales, circuitos digitales no programables y programables, etc. A nivel industrial comercial, los controladores lógicos programables (PLC, por sus siglas en inglés) constituyen la tecnología dominante; por ejemplo, un software especializado para la programación de PLC de distintos fabricantes como el CODESYS (CODESYS, 2013) agrupa más de 300 fabricantes con miles de controladores comerciales. Por otra parte, el paradigma del hardware abierto (OSHWA, 2012) como medio para solucionar problemas diversos es cada vez más notorio, tal como se mostró en el "Open Hardware Summit 2013" llevada a cabo en el M.I.T (Mathilde, 2013), en donde se observó un crecimiento de las compañías basadas en este modelo de negocio, tal como se aprecia en la Figura 2.
Figura 2 Fundación de compañías que desarrollan Open Hardware en Estados Unidos. Tomado de Mathilde, 2013.
La Plataforma Arduino
Si bien es cierto existen muchas plataformas de desarrollo de hardware abierto, los microcontroladores conocidos como Arduinos se han convertido en el ambiente de prototipado más usado a nivel global (Leung, 2012), por su costo, su variada oferta de controladores y accesorios y su forma de programación basada en C con múltiples bibliotecas de código abierto, aunado a su capacidad de procesamiento. Por ejemplo, si se revisa la especificación técnica para la tarjeta Arduino MEGA (Arduino, 2014a), se observa que posee un procesador marca ATMEL modelo ATmega 2650 (ATMEL, 2014), que es un procesador de 8 bits tipo RISC que procesa 16 millones de instrucciones por segundo (MIPS) a 16 MHz; una memoria de trabajo flash de 256K Bytes, 54 pines configurables como entradas o salidas, 16 entradas analógicas de 0 a 5 voltios con una resolución de 10 bits y frecuencia de muestreo de 10kHz, etc. Con estas especificaciones de procesamiento y capacidad para manejar entradas y salidas digitales, es válido plantear la automatización de pequeña escala con estos dispositivos, es decir, como sustituto de controladores industriales tales como los relés inteligentes y los nano y micro PLC. Actualmente existe en la red de profesionales LinkedIn un debate abierto sobre la utilización o no de los Arduinos en la industria (Shervin, 2013), en procesos no críticos, no riesgosos o en sistemas automáticos de magnitud pequeña o en máquinas aisladas.
Si se revisan las especificaciones técnicas del micro PLC de última generación modelo CPU 1212C (SIEMENS Corp., 2012), se ve que posee una memoria de trabajo de 50 K Bytes, procesa 10 MIPS y tiene 8 entradas y 6 salidas digitales, con 2 entradas analógicas, etc. Si se comprara solamente la velocidad de procesamiento, cantidad de memoria y cantidad de entradas y salidas, el Arduino Mega es una opción superior a este PLC particular. Sin embargo, estas no son las únicas variables que se deben analizar; el PLC tiene características a su favor, por ejemplo, las entradas están aisladas optoeléctricamente, posee salidas a relés o a transistor de 24 voltios, tiene carcasas plásticas con algún grado de protección IP, el software de programación utiliza lenguajes de programación estandarizados definidos en la norma IEC 61131-3, -lo que facilita las modificaciones a los programas de automatización-, tiene respaldo del fabricante, certificaciones eléctricas UL, CE, etc., modularidad y expansión, manejo de protocolos industriales, etc.
Dadas algunas debilidades que se le señalan al Arduino, han aparecido versiones de hardware robustas, pensadas para ambientes más hostiles, tal es el caso de Ruggeduino (Rugged-Circuit, 2013) que incorpora protección para todas las entradas, montaje para riel DIN; el PLC Arduino, que consiste de shield (tarjeta de expiación) para Arduino Uno, en el que las entradas son optoacopladas para señales de 24 voltios DC, salidas a relé, puertos de comunicación RS 485 y ethernet (Biemme-Italia , 2014); y el Industrino, con carcasa para riel DIN, pensado para la automatización domótica (Ainura, 2014) (ver Figura 3).
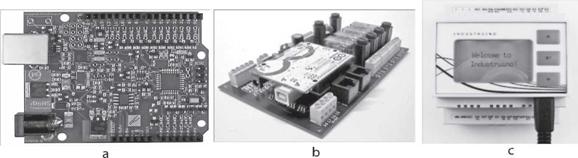
Figura 3: a) El Ruggeduino, b) PLC Arduino, c) Industrino. Tomado de (Rugged-Circuit, 2013; Biemme-Italia , 2014; Ainura, 2014)
Por otra parte, a nivel industrial ya aparecen casos exitosos reportados, como la puesta en marcha de una impresora industrial de etiquetas plásticas controlada totalmente por cinco Arduinos (Romano, 2013), o la actualización con Arduinos de una máquina cuyas tarjetas obsoletas no se conseguían en el mercado (MAAC, 2012). Por otra parte, y atacando otra debilidad señalada como la interconexión con otros dispositivos, la compañía Annikken (Piasim Corporation, 2014) ofrece el shield de conexión bluetooth para controlar, monitorear, guardar datos en cualquier dispositivo móvil con el sistema operativo Android o IOS. Asimismo, el control o monitoreo a través de internet se realiza de forma muy sencilla usando el Arduino Yun y las bibliotecas de Temboo (Temboo, 2013), que permiten publicar en tiempo real datos en Facebook, Twitter o tablas de datos y curvas en Plotly (Plotly es una herramienta científica basada en la WEB, para importar datos y genera gráficas de tendencias, líneas de ajuste, graficas de barra, etc.).
Otra tendencia marcada para la utilización de los Arduinos consiste en realizar la adquisición de datos y el preprocesamiento en el sitio, con enlaces inalámbricos a otros dispositivos, sin embargo, para esto se requiere mayor potencia de procesamiento. En este sentido, Intel incursiona desarrollando el Arduino llamado Galileo (Arduino, 2014c), que tiene un procesador Intel de 32 bit, que corre a 400 MHz, con 256 Mega Byte de memoria de trabajo, redes ethernet de 100 Mbits, mini-PCI y memory card de 32 Giga bytes, capacidades de sobra suficientes para realizar labores de automatización, adquisición y preprocesamiento de datos, etc.
Para la compra de tarjetas, sensores, accesorios y distintos shields para Arduino, existen varios proveedores en Costa Rica, como Radio Shack o tiendas virtuales como CRCibernepetica (Gridshield, 2014), que ofrecen una amplia gama de hardware con precios similares o idénticos a los publicados en tiendas especializadas en Estados Unidos como Sparkfun (SparkFun-Electronics, 2009).
Programación de los Arduinos
En cuanto a su programación, los Arduinos se codifican con el lenguaje C o C++ en el entorno del desarrollo integrado (IDE) de Arduino (Arduino, 2014b). Además, existen paquetes de programación alternativos, por ejemplo, el CodeBlocks for Arduino (Huang, 2013). También se puede programar de manera gráfica usando Ardublocks (Ardublocks, 2014) o el paquete QP Framework (Quantum-Leaps, 2014) diseñado para programar máquinas de estado complejas a partir de los SateChart. La utilización de software para el procesamiento numérico o computación científica, tal como Scilab 5.5, es posible gracias al lenguaje de programación gráfico de Xcos y una biblioteca desarrollada por Bruno Jofret (Jofret, 2013). Cabe destacar que los paquetes mencionados y sus bibliotecas son gratuitos y de uso público.
Desde la perspectiva de los softwares comerciales, los microcontroladores Arduinos se pueden programar de manera gráfica desde el software de programación LabView de National Instrument (National-Instrument, 2013) o desde Simulink de Matlab (Picker, 2012). Si bien estos últimos paquetes son reconocidos para realizar computación científica, se requiere la compra de las licencias, y en el caso de Matlab la compra de la biblioteca para el Arduino.
Programación del Arduino Mega
Para comprobar las facilidades de programación del Arduino como sustituto de un nano o micro PLC, se decidió programar un controlador para un sistema de eventos discretos, ejemplificado por dos alternadores de bombas, donde cada alternador responde de forma independiente a la dinámica de los eventos. Con la finalidad de que el diseño del control sea poco complejo, el diseño no contempla la detección, ni diagnóstico de faltas o fallas en el sistema.
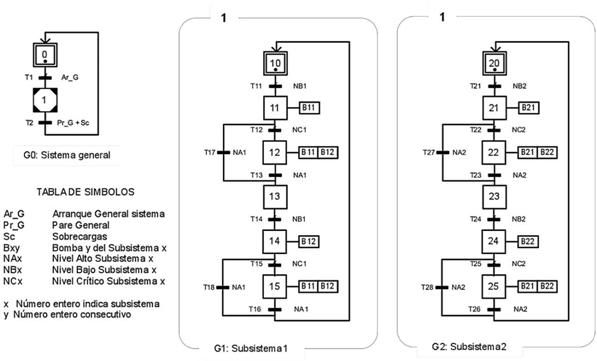
Figura 4: GRAFCET para dos alternadores de bombas que arrancan y paran por las mismas señales de mando.
El automatismo cuenta con dos botoneras, un botón arranque general y otro para el apagado general o sobrecarga. Cada sensor y actuador tendrá un código que indica a qué alternador pertenece; ese número se indica con la letra y. Cada subsistema de alternancia de bombas posee un tanque de captación, que a su vez tiene tres sensores de nivel, llamados nivel alto NAy, nivel bajo NBy y nivel crítico NCy; además existen dos bombas llamadas By1 y By2. Cuando el agua activa el sensor de nivel NBy, la bomba By1 se activa y se apaga hasta alcanzar el nivel NAy. La próxima vez que se active el sensor NBy, se activa la segunda bomba By2 y se apaga hasta alcanzar NAy. Si la demanda de agua es tal que el nivel en el tanque descienda, el sensor NCy se encenderán ambas bombas. El sistema debe recordar el orden de la alternancia. Esta secuencia de operación se repite hasta que se presione el apagado general del sistema o la señal de sobrecarga. La solución lógica se muestra en la Figura 4, y se realizó según la norma IEC 60848 (IEC-60848, 1999), conocida como GRAFCET.
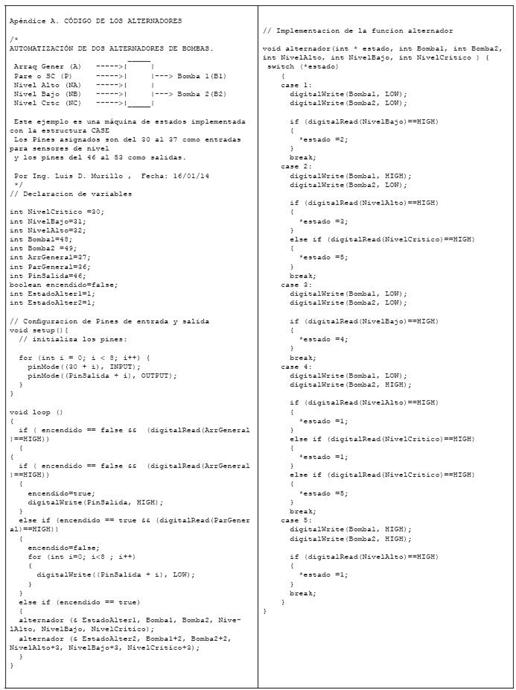
La implementación del controlador se hizo de dos formas; en la primera se usó el paradigma de la programación gráfica mediante el software LabView 12.0. En la Figura 5 se muestra la implementación del ciclo de escaneo de cinco etapas, lectura de entradas, ejecución de código, escritura de salidas, comunicación y manejo de error de código. El código de los alternadores no se muestra por razones de espacio y estos están encapsulados en dos Virtual Instruments indicados con los nombres de Alternado 1 y Alternado 2 en la Figura 5. Para la otra implementación se utilizó el lenguaje C a través del ambiente de desarrollo de Arduino (ver código en Apéndice A).
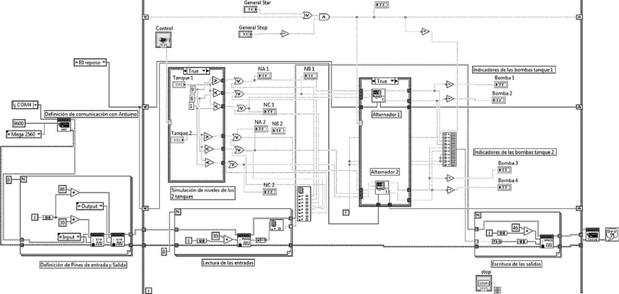
Figura 5 Programación del Arduino Mega usando LabView 12 de dos alternadores de bombas. Análisis de las implementaciones
Análisis de las implementaciones
Las implementaciones del sistema de alternadores de bombas se realizaron sin mayores inconvenientes. Ambas soluciones controlaron el sistema de eventos discretos de acuerdo a los requerimientos de funcionamiento planteados por el GRAFCET. Sin embargo, se encontró una diferencia sustancial entre ambos modos de programación. Cuando se programó en lenguaje C, el microcontrolador AMTEL es el que ejecutó el código, por tanto es ideal para aplicaciones de control en tiempo real tipo stand-alone; pero cuando se programó con LabView, el Arduino funcionó como una tarjeta de entradas/salidas digitales y el procesamiento de los datos y la ejecución de los algoritmos los realizó el ambiente de desarrollo en la PC.
Las razones principales para utilizar Arduino en proyectos de automatización de pequeña escala se encuentran en las capacidades del hardware y sus costos. Se sabe que los Arduinos de gama alta poseen prestaciones superiores de procesamiento que muchos nano PLC, poseen una cantidad elevada de entradas y salidas suficiente para automatizar procesos pequeños, soportan gran número de protocolos abiertos de comunicación, existe mucha oferta de tarjetas de expansión para soportar todo tipo de sensores, etc., todo esto a un precio reducido comparado con la contraparte comercial.
Por otra parte, las razones para no utilizar los Arduinos se deben a factores tales como: el grado de criticidad del proceso productivo, las políticas de estandarización de la empresa, la poca o nula escalabilidad del proyecto a futuro, el escaso soporte sobre productos, la pobre documentación y el nulo manejo de protocolos industriales. Además, todos los lenguajes de programación se alejan de la norma IEC 61131-3, lo cual dificulta que técnicos de planta puedan brindar soporte adecuado a los algoritmos de control. Finalmente, dado que el Arduino no ha sido concebido como PLC, recae sobre el programador implementar todas las funciones comunes de los nano-micro PLC, tales como temporizadores, contadores, PID, levas horarias, etc., así como muchas otras funciones de mayor o menor nivel.
Por las razones expuestas anteriormente, cada proyecto debe valorarse cuidadosamente para ver si los productos basados en la filosofía del open hardware son la solución adecuada. A mediano plazo se vislumbra que estos dispositivos solventarán las deficiencias señaladas dado el rápido avance tecnológico, e incursionarán no solo en la automatización de procesos industriales sino en la instrumentación científica de laboratorios, autotrónica, domótica, etc., como un competidor más de esos mercados.