











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Los vehículos aéreos no tripulados (VANTs) también conocidos como drones presentan múltiples ventajas (1), (2). Por ejemplo, se han descrito como plataformas seguras, ligeras, flexibles y automatizadas, capaces de obtener imágenes para muchas aplicaciones, son plataformas de bajo costo y presentan una alta eficiencia (3), (4), (5).
En el campo forestal los drones ofrecen la posibilidad de hacer una medición no invasiva y precisa de diversos atributos de los árboles (6). Por ejemplo, Torresan et al. (7) mencionan que algunas de estas aplicaciones son: estimación de información dasométrica o clasificación de especies de árboles. Por otra parte, se puede utilizar para el estudio de claros en el dosel y patrones espaciales, tal como lo hizo (8). Por último, también se han empleado para la detección de incendios forestales (9) y el monitoreo forestal (10).
En el mercado existen gran variedad de tipos de VANTs, desde los de juguete y de carreras, hasta los profesionales. Para actividades de monitoreo de plantaciones forestales se considera que los VANTs adecuados son los semiprofesionales, ya que su costo es asequible para las empresas, tienen incorporado sistema de GNSS, sensores anti-choque, brújula digital, IMU, sistemas RTK, etc., lo que permite que puedan usarse para realizar vuelos programados.
Existen diferentes parámetros fotogramétricos para la programación de los vuelos de un VANT (11), (12). Algunos de ellos son: altura de vuelo, traslape frontal y lateral, velocidad de vuelo, patrón de vuelo, orientación del dron, y “resolución espacial” (ground sample distance, GSD, por sus siglas en inglés), entre otras (13), (14). Existen pocas investigaciones que proporcionen información confiable sobre cómo planificar las misiones de los drones en actividades de monitoreo forestal y es necesario desarrollar experimentos que permitan probar diferentes opciones de vuelo, ya que estas influyen en la calidad de los productos que se desean obtener (15), (16).
Durante los últimos años se ha realizado diferentes investigaciones que permitan determinar los parámetros de vuelo óptimos para diferentes aplicaciones. Por ejemplo, se ha realizado estudios para determinar los parámetros de vuelos óptimos para obtener variables de la estructura del bosque (17), para mapear las malezas en trigo a una edad corta (18), para generar el mejor modelo digital de superficie en un cultivo (19) y también para generar un modelo de altura de copas en un bosque ubicado en Bélgica (20).
Las aplicaciones de software con licencia más utilizadas son Agisoft-PhotoScan®, Pix4Dmapper® y Ensomosaic®, así como el software libre OpenDroneMap, Mic Mac y VisualSFM (21). Todos estos softwares han sido utilizados para procesar imágenes obtenidas con un VANT y así obtener diferentes productos, tal como: ortomosaicos, modelos de elevación, y nubes de puntos, entre otros (22, 23, 24, 25, 26, 27, 28, 29).
El objetivo principal de la investigación fue evaluar herramientas informáticas de procesamiento de imágenes, opciones de procesamiento y parámetros de planificación de vuelo óptimos incluyendo: altura de vuelo, combinación de traslape lateral y frontal, y diseño de trazado del vuelo para un adecuado monitoreo de plantaciones forestales utilizando un vehículo aéreo no tripulado (VANT) semiprofesional.
Materiales y métodos
Áreas de estudio y descripción de las plantaciones
Se realizaron vuelos en cinco plantaciones forestales (seleccionadas al azar) ubicadas en cuatro provincias de Costa Rica: Alajuela, Guanacaste, Heredia y Limón (figura 1). La temperatura promedio en estas plantaciones varía entre 19,0 y 27,0°C mientras que la precipitación anual ronda los 1500-4000 mm (30). Tres de estas plantaciones corresponden a la especie Tectona grandis L., una de Gmelina arborea Roxb., y una plantación mixta la cual incluye especies como: Hyeronima alchorneoides L., Schizolobium parahyba S.F.Blake, Eucalyptus degluta Blume, Tabebuia rosea Bertol., Vochysia ferruginea Mart.
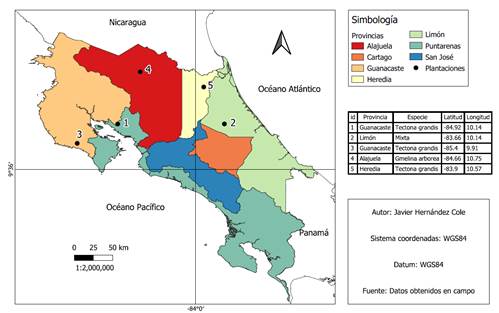
Figure 1. Location of the project forest plantations in Costa Rica.
Planificación y desarrollo del vuelo del VANT
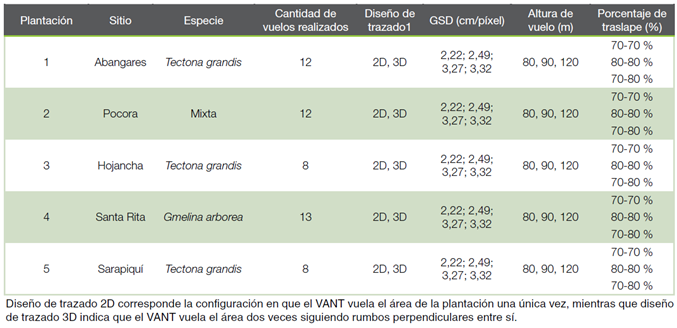
La programación de los vuelos del VANT se realizó utilizando la aplicación Pix4Dcapture® y siguiendo los pasos descritos por Tapia et al. (31). Las variables que se configuraron en la aplicación fueron: la combinación de traslape lateral y frontal, la altura de vuelo (en m), el cual define el GSD de las imágenes, diseño de trazado de los vuelos y ángulo de la cámara. Es importante mencionar, que no se utilizó puntos de control terrestre o sistema RTK porque no estaba dentro de los objetivos del proyecto de investigación y además no se contaba con dicha tecnología. A continuación, en el cuadro 1 se muestra los diferentes parámetros de planificación de vuelo utilizados en cada una de las plantaciones.
Cuadro 1 Parámetros de planificación de vuelos utilizados y número de visitas realizadas a las diferentes plantaciones.
Se utilizó un dron DJI WAV Phantom 4 Pro model (DJI, China) para realizar los vuelos en cada una de las plantaciones. Para esta etapa se posicionó al dron en el punto de partida definido en la etapa de planificación de los vuelos y se procedió a iniciar el vuelo de este con ayuda de la aplicación de Pix4Dcapture® y un teléfono celular iOS. En cuanto al número de imágenes, este valor varió según el tamaño de cada plantación y los parámetros de vuelo indicados en el cuadro 1.
Diseño experimental
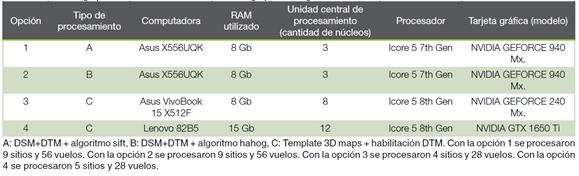
El diseño del experimento para determinar el mejor software y opciones de procesamiento fue un diseño factorial en el cual los factores fueron las opciones de procesamiento con cuatro niveles (cuadro 2) y los tipos de software de escritorio con dos niveles: Pix4Dmapper® y WebODM® (versión standard).
Con respecto a los parámetros de planificación de vuelo se realizó un diseño factorial considerando las siguientes tres variaciones: combinación de traslapes con tres niveles: 80x80, 70x70, y 70x80 donde el primer porcentaje corresponde al traslape lateral y el segundo al frontal. Además, incluye el factor diseño de trazado con dos niveles: 2D y 3D, el primero con un ángulo de cámara de 90 grados, y el segundo con un ángulo de 80 grados, y la altura de vuelo (en m) con tres niveles: 80, 90 y 120 metros. Con la combinación de estos dos últimos factores se obtuvieron imágenes con GSD de: 2,22; 2,49; 3,27; y 3,32 cm/píxel. Cabe resaltar que no se utilizaron todas las combinaciones posibles de factores y además se realizaron varios vuelos utilizando las mismas variaciones, pero en diferente época del año.
Para determinar las mejores opciones de procesamiento y de diseño de vuelo se evaluaron como variables de respuesta: tiempo de procesamiento por hectárea, porcentaje de área omitida en el ortomosaico, el cual se refiere a pocos datos en la nube densa, y por último fallo en el procesamiento (0 y 1), es decir, 0 si el software utilizado no pudo ejecutar el procesamiento y 1 si tuvo éxito en la realización del mismo.
Procesamiento y análisis de la información
El procesamiento de la información obtenida se realizó con ayuda de los softwares Pix4Dmapper® y WebODM®, utilizando las opciones de procesamiento descritas anteriormente (cuadro 2). Se utilizó el procedimiento descrito en el manual desarrollado por Tapia et al. (31), el cual especifica la forma en que se realiza el procesamiento de datos provenientes de un VANT para los dos softwares a utilizar.
Una vez procesada la información, se realizaron análisis para verificar la normalidad de los datos obtenidos, y dado que no había un comportamiento normal en las muestras se recurrió al uso de pruebas no paramétricas.
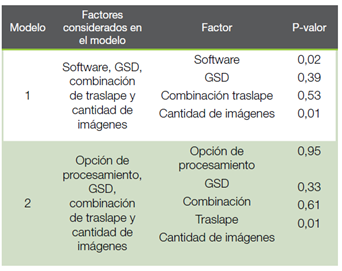
Las variables de respuesta tiempo de procesamiento (horas/hectárea) y porcentaje de área omitida en el ortomosaico se analizaron usando una prueba no paramétrica Kruskal Wallis con comparación de medianas, así como análisis gráficos para visualizar el comportamiento de estas variables con respecto a la cantidad de imágenes. La variable fallo de procesamiento se analizó usando una regresión logística usando dos modelos. El primero considerando los factores software, GSD, combinación de traslape (%) y cantidad de imágenes; y el segundo modelo incluyó los factores opción de procesamiento, GSD, combinación de traslape y cantidad de imágenes. Por último, también se realizaron análisis gráficos y cuadros para visualizar la cantidad de fallos en el procesamiento según software, opción de procesamiento, GSD, combinación de traslape y cantidad de imágenes. Todos los análisis se realizaron con ayuda de los programas estadísticos Infostat®, Minitab® y Excel®.
Resultados y discusión
Variable de respuesta tiempo de procesamiento
El tiempo de procesamiento (horas/hectárea) varió según el tipo de software existiendo diferencias significativas (P < 0,05). En la Figura 2A, se puede observar que el software Pix4Dmapper® fue el que obtuvo una menor cantidad de tiempo con respecto a WebODM®. Estos resultados coinciden con varias investigaciones, en las cuales el tiempo de procesamiento varío según el tipo de programa utilizado, así como que Pix4Dmapper® procesó las imágenes en una menor cantidad de tiempo (17), (32), (33), (34).
En cuanto a las opciones de procesamiento, se observan diferencias estadísticas significativas entre algunas opciones (P < 0,05) (Figura 2B), siendo la No. 4 la que obtuvo un menor tiempo de procesamiento por hectárea, opción que se diferencia de las otras por la cantidad de memoria RAM disponible en la computadora. Esto concuerda con otras investigaciones donde se encontró que el tiempo de procesamiento fue influenciado por el tipo de computadora a utilizar y/o la opción de procesamiento del software (17), (35).
Al evaluar el tiempo de procesamiento (hrs/ha) según el GSD utilizado, se puede observar que hay evidencia de diferencias significativas según la prueba de Kruskal-Wallis (P < 0,05) (Figura 2C). El vuelo empleado con un diseño de trazado 2D, a 120 metros de altura fue el que obtuvo un menor tiempo de procesamiento, seguido por el vuelo realizado a 120 metros de altura utilizando un trazado 3D, que corresponde a un GSD de 3,32 cm/píxel. Con respecto a los porcentajes de traslape utilizados en la captura de imágenes con el VANT, no se encontró evidencia de diferencias significativas (P > 0,05). Estos resultados son congruentes con una investigación realizada por Uzaktan et al. (36) en la cual obtuvo que para el software Pix4Dmapper® el tiempo de procesamiento fue menor cuando se voló a una altura mayor, lo cual genera vuelos con menor cantidad de imágenes y de menor resolución espacial. Por otra parte, Nam-Bui et al. (37) indican que el tiempo de procesamiento es inversamente proporcional a la altura de vuelo. Es decir, a mayor altura de vuelo y mayor GSD se obtienen una menor cantidad de imágenes, lo cual deriva en un menor tiempo de procesamiento.
Por otra parte, los resultados obtenidos de las diferentes interacciones de factores concuerdan con los obtenidos en la Figura 2. Para obtener una menor cantidad de tiempo de procesamiento es necesario procesar las imágenes con Pix4Dmapper®, la opción de procesamiento 4, y configuraciones de vuelo que tiendan a disminuir el número de imágenes a procesar, tal como: una altura de vuelo de 120 m, menor resolución (3,27 cm/píxel), un trazado 2D, y combinaciones de traslape lateral 70 o 80 %, y frontal: 70 o 80 %.
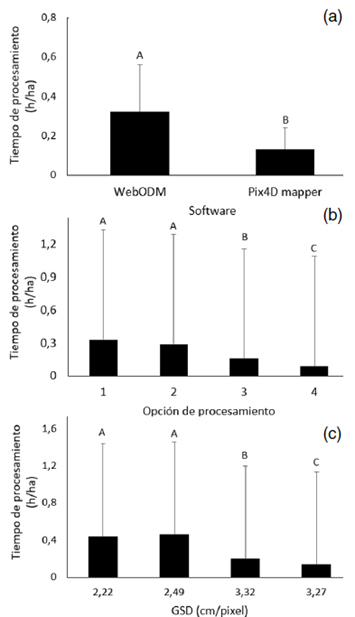
Figura 2. Diferencias en el tiempo de procesamiento según el tipo de software, opciones de procesamiento y GSD (cm/píxel). Nota: las barras de error de las figuras corresponden a la desviación estándar.
Figure 2. Differences in processing time according to software type, processing options and GSD (cm/pixel). Note: the error bars in the figures correspond to the standard deviation.
En la Figura 3, es posible apreciar la relación que existe entre el tiempo de procesamiento (horas) y la cantidad de imágenes por hectárea. En la mayoría de los casos, especialmente con las opciones de procesamiento 1 y 2, conforme aumenta la cantidad de imágenes también aumenta el tiempo requerido en el procesamiento. Esto coincide con varias investigaciones en donde el tiempo de procesamiento fue menor cuando se procesaban una menor cantidad de imágenes (32), (38).
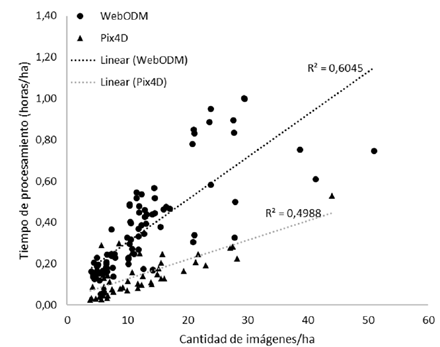
Figura 3 Relación entre el tiempo de procesamiento (horas/ha) y la cantidad de imágenes/hectárea de cada vuelo según el tipo de software utilizado.
Figure 3. Relationship between processing time (hours/ha) and number of images/hectare of each flight according to the type of software used.
Variable de respuesta porcentaje de área omitida en el ortomosaico
Se encontró que con el software Pix4Dmapper® se obtuvieron una mayor cantidad de áreas omitidas en el procesamiento de las imágenes tomadas con el VANT (P < 0,05). Por otra parte, se halló diferencias entre las opciones de procesamiento al 94 % de confiabilidad (P = 0,06) (Figura 4A). Esto puede ser explicado por las diferencias que se pueden presentar entre softwares en cuanto a calidad y productos a obtener (39). Sin embargo, en diversas investigaciones se menciona que la calidad del ortomosaico, tal como presencia de áreas omitidas, puede estar más afectado por los parámetros de vuelo que se vayan a utilizar (40), (41).
La prueba de Kruskal-Wallis muestra la existencia de diferencias significativas según el porcentaje de traslape al evaluar el área omitida en el ortomosaico (P < 0,05). Es posible notar que la combinación de traslape (lateral: 70 % y frontal: 80 %) posee un porcentaje menor que las demás (Figura 4B). Asimismo, a la hora de evaluar el GSD (cm/píxel) no fue posible encontrar diferencias significativas (P > 0,05). Este resultado contrasta con lo obtenido en otra investigación (41), donde menciona que a mayor porcentaje de traslape, las zonas con área omitida en el ortomosaico son menores. Por otra parte, Fraser y Congalton (40) indican que un bajo porcentaje de traslape resulta en una mayor cantidad de huecos en el ortomosaico, tendencia que solo se cumple entre las combinaciones (70/70 % y 70/80 %).
En cuanto a los resultados obtenidos en las interacciones de factores, estos indicaron que para obtener una menor cantidad de porcentaje de vacíos de información es necesario realizar el procesamiento con el software WebODM®, las opciones de procesamiento 1 o 2, una baja resolución (3,27 cm/píxel), un diseño de trazado 2D, y la combinación de traslape lateral: 70 % y frontal: 80 %.
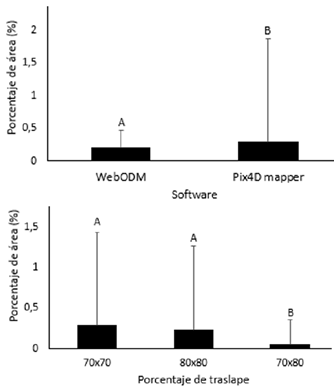
Figura 4 Porcentaje de área omitida según el software de procesamiento y combinación de traslape utilizada en el vuelo del VANT. Nota: las barras de error de las figuras corresponden a la desviación estándar.
Figure 4. Percentage of omitted area according to the processing software and overlap combination used in the UAV flight. Note: the error bars in the figures correspond to the standard deviation.
Variable de respuesta fallo en el procesamiento
Los resultados más importantes obtenidos en la regresión logística, fue que el factor cantidad de imágenes tiene una relación estadísticamente significativa con el fallo en el procesamiento para el modelo 1 y 2 ( P < 0,05).
Cuadro 3 Valor de significancia obtenidos en la regresión logística para la variable fallo en el procesamiento (0 y 1) de las imágenes.
Por otra parte, en la Figura 5, es posible visualizar que el software WebODM® presentó mayor cantidad de porcentaje de fallos que Pix4Dmapper®. Con respecto a las opciones de procesamiento, se presentó una mayor cantidad de fallas en las opciones 1 y 2 en comparación con la 3, mientras que la opción 4 no presentó fallas en el procesamiento de las imágenes. A la hora de procesar de 100 a 500 imágenes utilizando un equipo Windows es recomendable poseer los siguientes componentes: versión Windows 10 (64 bits), una CPU (quad core o hexa core Intel i9/ Threadripper/ Ryzen 9), una tarjeta gráfica GeForce GTX, un disco duro en estado sólido (SSD), una memoria RAM de 16 GB y un espacio de almacenamiento libre de 30 a 100 GB (42), (43). En esta investigación, la mayoría de estos requerimientos recomendados, fueron alcanzados por la opción de procesamiento 4, la cual no presentó fallas en el procesamiento de las imágenes.
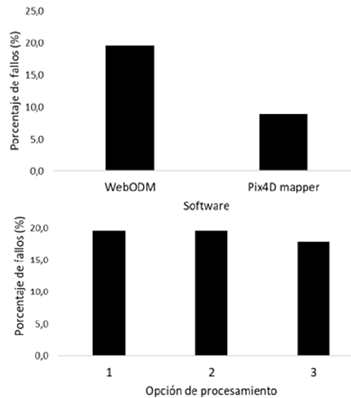
Figura 5 Porcentaje de fallos en el procesamiento según el tipo de software y opción de procesamiento.
Figure 5. Percentage of processing failures according to software type and processing option.
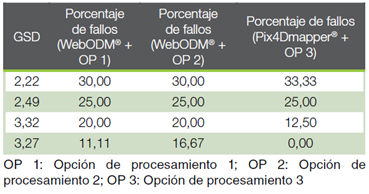
En el cuadro 4, se observa que se disminuye la cantidad de fallos cuando se disminuye la cantidad de imágenes presente en cada GSD. Por ejemplo, el GSD que presenta una mayor cantidad de imágenes (2,22 cm/píxel) fue el que obtuvo el mayor porcentaje de fallos en el procesamiento. En la presente investigación, las opciones de procesamiento que presentaron fallos fueron las que no poseían la mayoría de requisitos recomendados (opciones 1, 2 y 3), por lo tanto, al procesar más imágenes es más probable que no puedan llevar a cabo el procesamiento de los datos. Por lo tanto, es recomendable seleccionar un GSD que permita minimizar la cantidad de imágenes (3.27 cm/píxel), el cual se obtiene al volar a una altura de 120 metros y utilizando un diseño de trazado 2D (42, 43, 44, 45, 46).
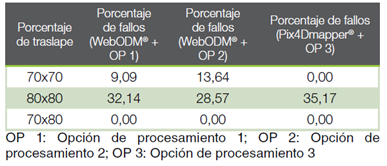
Al analizar el cuadro 5, es posible apreciar que las combinaciones de traslape lateral: 80 % y frontal: 80 %, presenta una mayor cantidad de fallos en el procesamiento en comparación con el porcentaje de traslape 70x70. Con respecto a la combinación 70x80 no se obtuvieron fallas en el procesamiento de las imágenes. Seifert et al. (47) mencionan que el porcentaje de traslape es uno de los factores más importantes a la hora de tener éxito en el procesamiento de imágenes provenientes de un VANT. Por lo tanto, si el usuario está utilizando una computadora con pocos de los requisitos recomendados, es mejor utilizar una combinación de traslape 70x80 debido a que esto permitirá que se tenga una probabilidad más baja de obtener un fallo en el procesamiento.
Cuadro 5 Porcentaje de fallos en el procesamiento según el porcentaje de traslape, software y opción de procesamiento.
El cuadro 6 muestra que al procesar de 0 a 125 imágenes se obtuvo un porcentaje de fallos inferior al 20 %, mientras que al aumentar la cantidad de imágenes a procesar el porcentaje de fallos fue superior al 40 %. Estos resultados sugieren una tendencia lineal la cual explica que, a mayor cantidad de imágenes, es más probable obtener una falla en el procesamiento de los datos. Esto concuerda con los resultados de la regresión logística (cuadro 3) en el cuál es posible observar que la cantidad de imágenes posee una relación estadísticamente significativa con esta variable de respuesta, por lo tanto, es recomendable seleccionar opciones de configuración de vuelo que permitan obtener una menor cantidad de imágenes, especialmente si no se tiene una computadora con la configuración óptima.

Conclusiones
El software Pix4Dmapper® procesó las imágenes en una menor cantidad de tiempo y obtuvo menos fallos de procesamiento. Sin embargo, es posible utilizar un software económicamente más accesible como WebODM® si se desea obtener menos áreas con vacíos de información dentro del ortomosaico, pero será necesario mejorar la capacidad de procesamiento de la computadora a utilizar. Los mejores parámetros de configuración de vuelos para realizar el monitoreo de plantaciones forestales son los vuelos utilizando una altura de 120 metros, un diseño de trazado 2D, para obtener una resolución espacial cercana 3,27 cm/píxel, y usar una combinación de traslapes lateral 70 % y frontal 80 %. Estos parámetros permiten obtener ortomosaicos de buena calidad, con menor tiempo y menor probabilidad de fallas en el procesamiento.

