











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
La fotogrametría es una técnica con utilidad en muy diversas aplicaciones como agricultura, silvicultura, topografía, inspección de estructuras, entre muchas otras. Esta técnica permite conformar mapas tridimensionales georreferenciados a partir de una serie de fotografías del área bajo estudio (1). Para efectuar un levantamiento fotogramétrico, es necesario la toma de fotografías con un cierto traslape que cubra por completo el terreno a analizar. Además, se debe tomar la información de tiempo, posición y orientación de cada una de las fotografías para un posterior procesamiento con el cual se pueden conformar los modelos de elevación digital. La implementación de esta técnica con sistemas aéreos no tripulados (UAS) representa una solución de bajo costo, sencilla y de alta resolución en comparación con otras alternativas como lo son el uso de aviones tripulados y satélites (2)
Actualmente en la escuela de Ingeniería Electrónica del Instituto Tecnológico de Costa Rica (TEC) en el laboratorio de fotogrametría (UASTEC), se investiga el uso de la técnica de fotogrametría con sistemas UAS para diversas aplicaciones. En este laboratorio se cuenta con plataformas del tipo multirrotor, porque presentan propiedades muy provechosas tales como una gran maniobrabilidad y agilidad. Si embargo, debido al alto consumo asociado a su principio de sustentación la autonomía de vuelo se compromete en aspectos como extensión de las misiones y cobertura.
A diferencia de las plataformas multirrotor, los sistemas de ala fija se caracterizan por tener una electrónica algo más simple y utilizar un sistema de sustentación con alas y pocos motores, por lo que su consumo energético es menor. Su estructura física asegura una aerodinámica más eficiente, que les permite alcanzar altas velocidades de vuelo y por tanto una cobertura más extensa. En conjunto estas dos propiedades perfilan a los sistemas de ala fija como una alternativa para el análisis a gran escala (3).
En este trabajo se discute el desarrollo y validación de una plataforma UAS de ala fija basada en una plataforma abierta, que pueda realizar misiones de vuelo de manera autónoma y que cuente con el equipo necesario para la toma de fotografías y la recolección de los datos de: ubicación espacial, posición geográfica y tiempo al momento de obtener las imágenes. Esto, con el fin de construir una herramienta escalable que sirva como recurso para análisis de superficies terrestres a gran escala. Este artículo presenta parte del trabajo desarrollado como proyecto de graduación para optar por el grado académico de Licenciatura en Ingeniería Electrónica (4).
Diseño del sistema UAS de ala fija
Actualmente en el mercado existen sistemas UAS del tipo de ala fija comerciales para aplicaciones fotogramétricas que varían según el precio, su carga, autonomía, entre otros. El problema con este tipo de plataformas es que son sistemas cerrados que no permiten al usuario realizar modificaciones de hardware o software por lo que ofrecen poca flexibilidad. Además, estos sistemas tienden a presentar un costo bastante elevado.
Este proyecto plantea el desarrollo de un sistema UAS de ala fija basado en una plataforma open hardware-source, que tenga la capacidad de realizar misiones de vuelo autónomas y cuente con una herramienta de código abierto que permita controlar, monitorear y planificar las misiones de vuelo. Además, este sistema cuenta con un equipo de cámara para la toma de las fotografías y la capacidad de recolectar la información necesaria para su posterior procesamiento.
Al estar basado en una solución open hardware se puede confeccionar una plataforma a partir de diversos módulos comerciales. Por medio de la metodología del diseño modular es posible plantear un concepto de diseño para la plataforma UAS de ala fija a partir de diversos módulos funcionales, en la figura 1 se muestra el concepto de diseño para esta plataforma. En las próximas secciones se explica el funcionamiento de cada uno de estos bloques y la implementación del sistema. Con respecto al proceso de selección y evaluación de los componentes de cada bloque, una descripción detallada se puede encontrar en (4, A.2)
Controlador de vuelo
Este bloque es el encargado de: controlar las misiones autónomas, manejar el sistema de propulsión, estabilizar el vuelo, establecer la comunicación con la estación en tierra y ejecutar las instrucciones del piloto. Para la confección de estas tareas la placa de control debe integrarse e interactuar con los demás elementos que conforman el sistema UAS. Los controladores de vuelo utilizados fueron el Apogee flight controller (5) y Pixhawk flight controller (6). Las dos placas cuentan con plataformas abiertas para el manejo de los sistemas UAS conocidas como Paparazzi UAV y Mission Planner, respectivamente.
Unidad de medición inercial
Este módulo está constituido por un acelerómetro, un magnetómetro y un giroscopio que son implementados para obtener la información necesaria para determinar la orientación del sistema. La unidad seleccionada fue el MPU-9150 la cual se encuentra integrada en la placa del Apogee. Este recolecta la información de sus sensores y las envía a la unidad de control por medio del protocolo de comunicación I2C donde se procesa para obtener los ángulos de orientación (roll, pitch, yaw), de la aeronave.
Módulo GPS
Es utilizado para determinar la ubicación física del sistema UAS, por medio de la lectura de señales GPS de latitud y longitud. El dispositivo seleccionado fue el GPS Ublox NEO-M8. Este envía las lecturas que obtiene a la placa de control a partir de la comunicación por protocolo UART para dar seguimiento de la ubicación del sistema en la estación de control en tierra en tiempo real. También es utilizado para recolectar información sobre la velocidad y altitud de la aeronave.
Módulo de telemetría
Este módulo se implementa con el objetivo de establecer un enlace de comunicación bidireccional entre la aeronave y la GCS (Ground Control Station). Los módulos seleccionados fueron los Xbee S1 PRO y los radios de 3DR. Este enlace se utiliza para la transmisión de información del estado del sistema (resultados de las medidas de los demás sensores, por ejemplo: ángulos de orientación, latitud, longitud, voltaje de la batería entre otros), y él envió de instrucciones del GCS al sistema.
Módulo de enlace por radiofrecuencia
Es un enlace de seguridad para el manejo del sistema UAS, por donde el piloto envía instrucciones a la placa de control como: el modo de vuelo, el movimiento de los alerones o el control del giro del motor. Para este módulo se utilizó el transmisor R/C FS-TH9X de marca Fly sky, que cual cuenta con 8 canales programables para manejar los actuadores del sistema UAS y el receptor R/C D4R-II de marca FrSky que trabaja con el protocolo PPM (Pulse Position Modulation), para su señal de salida. Para poder establecer un enlace entre estos módulos es necesario integrar el módulo de transmisión DJT de FrSky al control FS-TH9X.
Sistema de alimentación
Su objetivo es alimentar todos los módulos que conforman el sistema UAS. Estos en su mayoría se implementan por medio de baterías del tipo polímero de litio conocidas como LiPo (Lithium Polymer), por sus siglas en inglés, porque cuentan con una alta densidad de energía y son más ligeras que otro tipo de tecnologías. Se seleccionó la batería de marca PULSE de 2250 mAh de 3 celdas, con ella el sistema tenga una autonomía cercana a los 5 minutos.
Sistema de propulsión
Se encarga de transformar las señales de control provenientes de la placa de control en esfuerzos mecánicos para generar el impulso y la sustentación del sistema UAS. Está conformado por los siguientes elementos:
Servomotores: Son utilizados para el control del movimiento de los alerones en la estructura del sistema, a partir de las señales PWM que recibe de la placa de control. Los componentes elegidos fueron los Digital servo DS-238MG de marca Corona.
Motor sin escobillas (“Brushless”): Su principal objetivo es el de generar la propulsión del sistema, transfiriendo su energía rotacional a una hélice para impulsar la estructura en el aire. Se utilizó el modelo SUPPO A2217/7 para el motor y una hélice 8 x 6 de APC.
ESC: Su función es la de regular la velocidad del motor, es decir gestiona la aceleración del motor según la señal de control procedente de la unidad central. Se seleccionó el dispositivo ESC H-KING 35 A, debido a su compatibilidad con el modelo de motor elegido.
Implementación y validación del sistema UAS de ala fija
Esta sección presenta la implementación del sistema de ala fija y su validación para aplicaciones de fotogrametría. Se utilizó como cuerpo de la aeronave el kit Zagi THL (Thermal Hand Launch), por sus propiedades aerodinámicas. En la figura 2 se muestra el prototipo implementado del sistema de ala fija.
Con respecto a la ubicación de los elementos que conforman el sistema, se tomó en cuenta el centro de masa de la estructura para no afectar sus características durante el vuelo. En la figura 3 se muestra el lugar que ocupa cada uno de los módulos que conforman el sistema de ala fija.
Una vez finalizado el proceso de implementación del prototipo, se continuó con la etapa de validación de su funcionamiento para aplicaciones de fotogrametría. Para esto se efectuaron misiones de vuelo en las que el sistema UAS operará de manera autónoma. Se realizaron las pruebas en el Aero-club ELÉCTRICO RC de Tambor en Alajuela, porque cuenta con un gran espacio sin obstáculos para realizar los vuelos.
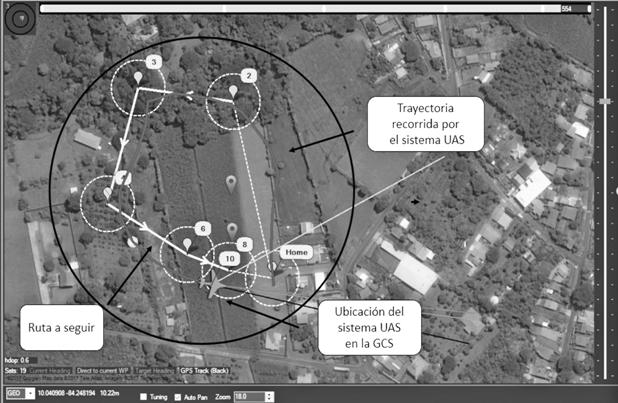
La misión se realizó con la plataforma Mission Planner con la cual se puede elaborar planes de vuelo por medio de la ubicación de puntos de navegación, que indican al sistema la ruta que debe tomar. Esta misión se diseñó a una altura de 40 m de altura, con el fin de evitar que el sistema chocara con algún obstáculo. En la figura 4 se ilustra el plan de vuelo que se ejecutó y la ruta seguida por la plataforma UAS.
Durante la ejecución de la misión, el sistema UAS no presentó desviaciones significativas en el seguimiento de la ruta establecida con el plan de vuelo. Contemplando la figura 4, se observa una diferencia entre la ruta seguida por el sistema (línea morada) con respecto a la ruta establecida por los puntos de navegación (línea amarilla), esto se debe a que en los sistemas de ala fija la llegada a un punto de navegación se da por finalizada cuando entra en el círculo de líneas punteadas de color blanco que rodea cada punto de ruta (“waypoint”). A partir de la prueba de vuelo se demuestra que la plataforma es capaz de ejecutar misiones de vuelo de manera autónoma.

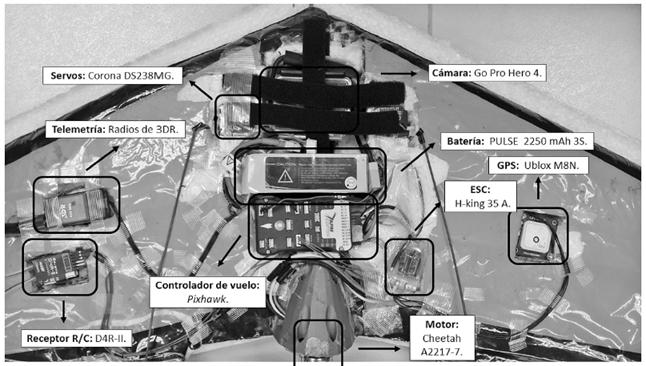
Figura 3 Ubicación de los componentes del sistema de control en la estructura del prototipo de ala fija.
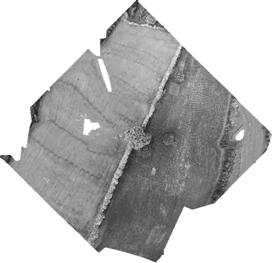
En relación con su validación para aplicaciones fotogramétricas, durante la ejecución de la misión de vuelo se instaló una cámara Go Pro Hero 4 en la plataforma UAS con el fin de obtener las fotografías del para generar modelos tridimensionales (7). En esta misión se obtuvieron 54 imágenes para la confección del modelo, para este procesamiento se utilizó el programa Agisoft Photoscan (8). En la figura 5, se muestran los resultados de los modelos tridimensionales que se generaron.
De la figura 5, se puede apreciar que los modelos contienen ciertos agujeros e imperfecciones por la forma en que se tomaron las fotografías, porque el vuelo no cubrió por completo la región que sobrevoló. Esto ocasionó que durante el procesamiento de las imágenes el programa descartara fotografías conllevando a que se formarán imperfecciones en los modelos. Debido a razones meteorológicas, temporales y espaciales imprevistas no se pudo desarrollar un plan de vuelo que pudiera recorrer por completo el terreno a tiempo.
Durante la ejecución de la misión, el sistema UAS no presentó desviaciones significativas en el seguimiento de la ruta establecida con el plan de vuelo. Contemplando la figura 4, se observa una diferencia entre la ruta seguida por el sistema (línea morada) con respecto a la ruta establecida por los puntos de navegación (línea amarilla), esto se debe a que en los sistemas de ala fija la llegada a un punto de navegación se da por finalizada cuando entra en el círculo de líneas punteadas de color blanco que rodea cada punto de ruta. A partir de la prueba de vuelo se demuestra que la plataforma es capaz de ejecutar misiones de vuelo de manera autónoma.
Conclusiones
Se mostró en este trabajo el proceso de diseño e implementación de un sistema UAS del tipo ala fija capaz de realizar vuelos de manera autónoma y de recolectar la información necesaria para la generación de modelos tridimensionales de terrenos. Por medio del uso de la metodología de diseño modular, con elementos basados en “hardware open-source”, se desarrolló una plataforma UAS de ala fija de bajo costo en comparación con las soluciones comerciales, que permite modificaciones y extensiones tanto a nivel de “software” como de “hardware”.
Se demostró que la plataforma UAS propuesta es capaz de ejecutar misiones de manera autónoma, a partir del seguimiento de un plan de vuelo con puntos de navegación que indican la ruta a tomar por el sistema. Se lograron confeccionar modelos tridimensionales a partir de la toma de fotografías durante los vuelos del sistema, los cuales se deben trabajar de forma más detallada en iniciativas futuras con el fin de estandarizar el proceso y poder obtener productos fotogramétricos de alta calidad.
Agradecimientos
Los autores agradecen al Dr. Héctor García de Marina, miembro del ENAC (Ecole Nationale de l’Aviation Civile), por su ayuda y asesoría para la ejecución del presente trabajo, así como al Sr. Jorge Umaña, por la asesoría y soporte con los componentes utilizados en este proyecto. Se agradece además al Dr. Mauricio Muñoz, por su colaboración durante la formulación de este proyecto.

