











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
A diferencia de las quemas prescritas, los incendios forestales son fuegos sin control que se extienden libremente en el bosque [1] y constituyen un flagelo ambiental porque destruyen flora, fauna y ambiente y su efectos varían según sean las condiciones ambientales, el tipo de flora que se quema y la velocidad del viento, pero siempre dejan grandes áreas quemadas. Por ejemplo, el área quemada (en el mundo) entre 2000 y 2009 debido a estos incendios fue de alrededor de diez millones de hectáreas, y han sucedido aún en regiones consideradas de solvencia económica y tecnológica (Australia, Arizona, California, Corea del Sur, Canadá, Europa) las cuales, aunque gozan de estas ventajas, no han podido solucionar estos problemas, a pesar de que se utilizan estrategias y tecnologías actualizadas para combatirlos [2]-[4].
El cuadro 1 presenta datos de promedios de área afectada en estas regiones cuyo efecto inmediato contribuye a la desaparición del bosque [5] con las consiguientes consecuencias ambientales. En Costa Rica, entre 1998 y 2006, los incendios forestales afectaron 35428ha y en 2007 al menos 6203ha según información de la Comisión Nacional sobre Incendios Forestales (CONIFOR) del Ministerio de Ambiente, Energía y Telecomuniciones (MINAET) [6].
Cuadro 1 Reporte de incendios y área afectada en diferentes regiones y países
| Región o país y período | Cantidad de incendios (y algunos costos reportados) | Área afectada (ha) |
|---|---|---|
| Australia (Febrero 2009) [7] | Suma de 13 diferentes regiones | 370,611 |
| Arizona (promedio anual 2000-2009) [8] | 70,862 | 6,422,780 |
| California (promedio anual) 2005-2009) [9] | 7,311 | 255,260 |
| Corea del Sur (Promedio anual 98-05) [2] | 402 ($9.197 mill./año) | 3.666 |
| Canadá 2003-2006 [10] | 8433 ($532.4 mill.) | 651,240 |
| Portugal* | 25000 | 157,066 |
| España* | 19000 | 125,687 |
| Francia* | 5000 | 22,935 |
| Italia* | 8000 | 85,047 |
| Grecia* | 2000 | 50,782 |
Las labores para el manejo y control del fuego forestal comprenden la detección como un primer paso [13], y las actividades de vigilancia y alerta permanente para detectarlos forman parte de las labores de protección ambiental. Actualmente se utilizan diferentes métodos para la detección del fuego forestal que los cuales se enriquecen con los avances tecnológicos, en particular de la electrónica, la computación y las comunicacionnes inalámbricas.
El presente documento tiene como objetivo identificar y analizar los requerimentos principales que deben tener los sensores utilizados para lograr la detección temperana de incendios forestales mediante redes inalámbricas de sensores RIdS, con especial atención en su aplicación en países en vías de desarrollo. El artículo está organizado de la siguiente forma:
En la sección 1 se describe la importancia de la detección temprana de incendios forestales (DTIF) y la necesidad de utilizar los sensores que faciliten esta operación en las labores de manejo y control del fuego forestal. En la sección 2 se presenta un análisis de la influencia de las variables físicas y químicas y de los sensores utilizados para lograr la DTIF en tiempo real, la escalabilidad de la red y el costo de la misma. En la sección 3 se analizan los requerimientos de los sensores para facilitar la DTIF en tiempo real, escalable, a bajo costo y en forma práctica. En la sección 4 se hace una evaluación de la tecnología de sensores para DTIF señalando ventajas y desventajas tanto de los sensores de variable química como los de variable física. En la sección 5 se presentan los métodos utilizados para la detección de fuego mediante las emisiones o variables químicas (CO, humo y CO2), las cuales son detectadas mediante dos estrategias: la respuesta de estas variables a fenómenos físicos (absorción de IR, dispersión IR, ionización, efectos fotoacústicos), y la interacción (absorción, reacción química o una combinación de ambas) de estas variables con el material del sensor utilizado. En la sección 6 se dan las conclusiones de los temas analizados. Posteriormente se analizan las ventajas y desventajas al utilizar tanto los sensores de variable física como los de variable química. Por último, se plantea la decisión de utilizar uno u otro tipo de sensor para realizar la DTIF.
Importancia de la detección temprana de incendios forestales.
La importancia de una la detección temprana de los incendios forestales radica en que se evita la quema de grandes extensiones de bosque, que desaparecen o requieren mucho tiempo para recuperarse.
La detección del fuego en el bosque es el primer paso en las labores de manejo y control de incendios forestales [14] y para ello se utilizan medios terrestres, aéreos y satelitales. Sin embargo, la detección temprana por cualquiera de los métodos mencionados es un objetivo primordial, y se debe lograr al inicio del fuego, antes de que éste adquiera dimensiones perjudiciales al extenderse a causa del follaje, la acción del viento, tras lo cual será difícil de sofocar. Si la detección del incendio forestal se hace en forma tardía, se requerirán mayores recursos tanto materiales como humanos, de acuerdo a la gravedad de la situación y de la categoría o nivel con que se clasifique el incendio, lo cual encarece la actividad de protección del bosque. Es importante, por lo tanto, investigar y proponer métodos nuevos o mejorados para facilitar y abaratar la detección temprana de incendios forestales.
Relevancia de la tecnología de sensores para la DTIF.
Los sensores para la detección de fuego en el bosque son utilizados para facilitar el estado de alerta cuando se presentan condiciones ambientales críticas (HR <30%, T>30 0C, Vviento >30 kph) las cuales favorecen la aparición y la dispersión acelerada de fuego en el bosque convirtiéndolo en un incendio forestal, como se comenta en [15]-[17]. Sabiendo que cualquier incendio forestal se inicia como un fuego de pequeña proporción, estos sensores facilitan la DTIF con un bajo costo, en tiempo real y escalable.
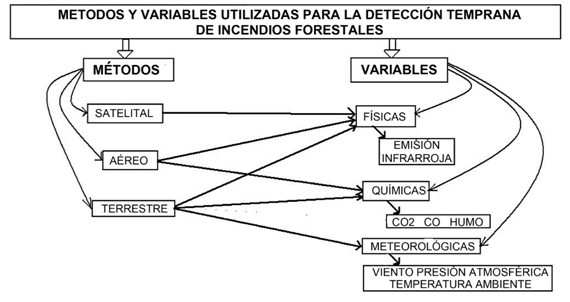
Sensores y variables para facilitar la DTIF.
Los sensores utilizados en la detección de fuego en el bosque corresponden a diferentes variables, unas relacionadas directamente con la existencia y dispersión del fuego y otras vinculadas a las condiciones ambientales críticas para su posible aparición.
Las variables indicadoras de la existencia del fuego son de naturaleza química, como las emisiones de humo y gases como el CO, CO2, HC4 [18]-[20], y de naturaleza física como la radiación infrarroja y el calor [21]-[24].
Las variables relacionadas con la posible aparición del fuego son de naturaleza meteorológica (como velocidad del viento, humedad relativa, presión atmosférica, temperatura ambiente), ambiental (como el follaje combustible y su distribución), topográfica (como la inclinación o pendiente del bosque) tal y como se muestra en la figura1. Mediante estas variables se puede estimar la probabilidad de la aparición de fuego en el bosque [25]-[28]
La DTIF está concebida para dar la alarma cuando se ha iniciado el fuego, y es por esta razón que se deben utilizar sensores para las variables indicadoras de la existencia del fuego, esto es, sensores para la variable química (emisiones de humo, CO, CO2, CH4) y para la variable física (radiación infrarroja y el calor).
Las caracterísiticas de los sensores utilizados son determinantes para descubrir el fuego en su inicio en tiempo real, para mejorar la escalabilidad, disminuir el costo de la red de sensores, y lograr la detección en forma práctica.
Requerimientos de los sensores para facilitar la DTIF en tiempo real, escalable, a bajo costo y en forma práctica.
Desde la perspectiva del sensor se puede asegurar que:
El concepto de tiempo real se puede hacer mas efectivo con la siguiente estrategia:
Utilizando sensores con un umbral absoluto bajo que permita descubrir el fuego al inicio cuando tiene poca intensidad, según sean las condiciones de detección en ambientes naturales que mencionan Calle y Casanova [24] y Arrúe et al [29], [30].
Logrando acercar el sensor al lugar donde comenzó el fuego, pues la probabilidad de descubrirlo en su inicio es mayor si la distancia a éste es menor como indican Rego y Catry para la vigilancia desde torres de observación [31]. La cercanía al punto de inicio del fuego se puede lograr desplegando una alta densidad de sensores como lo reportan Yu et al [32], y además se puede disminuir la influencia de las fuentes de falsas alarmas que mencionan Ollero et al [29], [30] y Schroeder [33].
Disminuyendo el tiempo que requiere el sensor en hacer el descubrimiento verdadero del fuego, el tiempo de transmisión de los datos del sensor y del procesamiento en el centro de análisis respectivo [29], [32], [34]-[36].
La escalabilidad se puede hacer mas efectiva con la siguiente estrategia:
Al utilizar sensores que permitan la detección individual a la mayor distancia del punto de inicio del fuego [37] dentro del escenario real que presenta el bosque y poder cubrir con cada sensor la mayor área de bosque.
Diseñar el despliegue del conjunto de sensores que asegure más área de cobertura por el conjunto [27], [28], [38] dentro del escenario real que presenta el bosque, asegurándose de no perder la efectividad de la cobertura que consiste en que cada punto del área esté dentro del radio de detección del sensor como lo mecionan Jin et al [39].
El menor costo se hace más efectivo con la siguiente estrategia:
Al disminuir la relación costo-diseño electrónico de cada sensor [28], [38]-[41]. Algunas detalles y análisis de diseño lo ofrecen Szewczyk et al [42].
Al reducir la relación costo-captura y procesamiento de los datos del sensor [43].
Al disminuir la relación costo-captura y transmisión de datos del sensor [28], [38].
Al disminiur la relación costo-umbral del sensor [44].
Al disminuir la relación costo-distancia de detección/área cubierta del sensor [28], [38].
Al disminuir la relación costo-despliegue de los sensores [27], [38], [45].
con el acceso fácil a los componentes en el mercado [40], [46], [47] (utilizando COTS) - Al disminuir la relación costo-vida útil del sensor [48].
Al disiminuir la relación costo-mantenimiento y operación del sensor como lo reportan Solima et al en la detección del fuego en el bosque [49] y como analizan Buratti et al para diferentes ascenarios de aplicación de la RIdS [50] y como lo mencionan Yick et al [51] con respecto al consumo energético.
La forma práctica para facilitar la DTIF incluye la estrategia de utilizar sensores de baja potencia.
Al considerar sensores de baja potencia para ahorrar la capacidad energética de la batería que lo alimenta, y mantener el presupuesto energético del nodo sensorial lo más bajo posible.
El uso de sensores de baja potencia permite monitorear el ambiente las 24 horas del día, aún cuando el nodo esté en el modo dormido [52]-[54].
Evaluación de la tecnología de sensores para DTIF
De acuerdo a lo expuesto anteriormente en la sección 3 se pueden señalar ventajas y desventajas tanto de los sensores de variable química como física.
Sensores para las emisiones infrarroja y térmica (variable física)
La utilización de sensores de emisión infrarroja y térmica, e imágenes de humo es un método ampliamente comentado en la literatura científica [33], [55]-[61]. Estos sensores presentan ventajas y desventajas como como se explica a continuación:
Ventajas:
Tienen alta sensibilidad lo que les permite una gran distancia de detección apta para utilizarlas en el método aéreo, satelital o en torrers de observación pero están sujetos a la pérdida de las señales infrarrojas en la atmósfera y el espacio libre [24], [33], [47]
La utilización de cámaras infrarrojas o visuales se ubica dentro de la observación anterior, y el mercado ofrece productos variados y de bajo costo.
Desventajas:
La ventaja señalada para estos sensores disminuye al utilizarlos en tierra, pues el follaje y los obstáculos del terreno atenúan la emisión infrarroja en los momentos en que nace el fuego, justo cuando se requiere lograr la DTIF.
Para el mejor aprovechamiento de los sensores es necesario emplazar de torres para aumentar la altura de su ubicación y así tener línea de vista y poder disminuir el efecto del follaje y los obstáculos (aunque esto encarece el método), o bien valerse de la detección aérea o satelital, que son métodos que no aportan una DTIF efectiva [32].
Se necesita el procesamiento de imagen correspondiente lo que va en detrimento del costo y la DTIF en tiempo real [62].
Sensores de emisiones químicas
Para utilizar sensores de emisiones químicas producto del fuego (CO, CO2 y humo) se requiere de tomar en cuenta el ambiente donde funcionarán, y las características más importantes que se requieren de los mismos, las cuales se mencionan en [46], [47] y son:
Tiempo de respuesta corto, bajo costo, alta selectividad, alta sensibilidad a la detección del gas, largo tiempo de vida útil, dimensiones pequeñas, baja deriva de la variable de salida con el tiempo, bajo consumo de potencia, libre de la interferencia de gases atmosféricos, facilidad para detectar el mal funcionamiento [65], [66]
Para la aplicación en la detección de fuego en el bosque, estas características dan a estos sensores las siguiente ventajas y desventajas:
Ventajas:
Se pueden utilizar para la detección terrestre del fuego en su inicio, pues las emisiones se difunden por el aire y pueden llegar a los rincones del bosque, no necesitan línea de vista ni ubicarse a gran altura [30].
Para las variables químicas el mercado ofrece sensores de buena sensibilidad y costo variable [67], [68]. Entre los fabricantes están Figaro, Hanwei, Microsens, Alphasense, General Electric, SENCERA, NICERA, CAPTEUR.
El mercado ofrece sistemas para protección contra fuego en espacios cerrados, cuyas normas de instalación y desempeño se mencionan en [69], y su adaptación para emplearlos en la DTIF puede ser objeto de investigación.
El mercado ofrece sensores y sistemas para la detección óptica del humo en espacios cerrados , y es importante investigar su utilización en espacios abiertos como el bosque .
El sensor genera cambios de voltaje en los terminales de salida ante la presencia de la variable química, por lo que el procesamiento de la información es mas simple que un procesamiento de imagen [70].
Antes de que se presenten concentraciones que lleguen al límite máximo soportado por los sensores, ya se habrán detectado concentraciones menores del gas, propias del umbral de detección del inicio del fuego, y esta es la condición básica para la DTIF.
Desventajas:
Algunos sensores requieren de calentamiento para elevar la temperatura y poder detectar el gas, lo que implica consumo de energía.
Los sensores de CO o CO2 se pueden dañar si se sobrepasan los valores límites de funcionamiento dados por el fabricante (como se advierte en [60] para la potencia de calentamiento y en [59] para la exposición a ambientes corrosivos)
Los sensores de gas tienen un límite máximo de humedad relativa a la que deben estar expuestos, lo que requiere alguna estructura de protección adecuada cuando se utilizan en el bosque como mencionan Bayo et al [44].
La concentración de humo y gas se ve disminuida en el punto de detección debido a la dispersión en el bosque, y esto afecta el rendimiento de los sensores que requieren de una deteriminada cantidad de ppm y un porcentaje de oscurecimiento mínimo [61], [62] para lograr la DTIF al inicio del fuego. Estos requerimientos estimulan la investigación con el fin de aumentar la concentración de humo en forma indirecta en el punto de detección.
Detección de algunos componentes de las emisiones químicas del fuego forestal.
Para la facilitar la DTIF es importante la investigación para adaptar en espacios abiertos como el bosque, los métodos que ya se han desarrollado para detectar fuego en espacios cerrados, principalmente los que se obtienen con facilidad en el mercado.
Detectores de partículas de humo
Los métodos para la detección de fuego utilizando las emisiones o variables químicas (CO, humo y CO2) están muy desarrollados para espacios cerrados (como hogares y edificios) y en el mercado se venden sistemas de bajo costo. Las variables mencionadas son detectadas mediante dos estrategias:
la respuesta de estas variables a fenómenos físicos (absorción de IR, dispersión IR, ionización, efectos fotoacústicos)
la interacción de estas variables con el material del sensor utilizado (adsorción, reacción química o una combinación de ambas).
Uno de los objetivos de la investigación es utilizar en espacios abiertos los sistemas conocidos que se utilizan en espacios cerrados, y aprovechar las ventajas que poseen, su costo razonable y su disponibilidad en el mercado, para tener éxito en la detección temprana de incendios forestales (DTIF) .
La detección de partículas de humo (aerosoles) en los sistemas comerciales se lleva a cabo, principalmente, mediante dos métodos: la ionización y el método óptico (o fotoeléctrico) [71], [72]. La detección de emisiones como el CO y el CO2 o humo se logra con los métodos anteriores, y también se utilizan sensores electroquímicos y metodos electroacústicos.
El método de ionización utiliza un elemento radiador de partículas alfa (Americio 241) o partículas beta (niquel 63) [73] que ionizan el aire. Se tiene una cámara donde se confinan las partículas alfa y donde el aire está ionizado, situación que se aprovecha para producir una corriente eléctrica en ese aire, entre los electrodos. Cuando las partículas de humo ingresan a la cámara entran en contacto con el aire ionizado, obstaculizando la movilidad de los iones y esto provoca que la corriente se altere, y esta variación de corriente es la que se utiliza para dar la alarma que indica la presencia de humo (ver fig. 2).
El método fotoeléctrico se vale de un haz de luz infrarroja como medio de detección. Una forma de aplicar este método (NDIR, no dispersivo) consiste en proyectar el haz desde la fuente emisora de luz hasta el receptor, previendo que ante la presencia del humo o algún gas, la luz se vuelva opaca y alguna longitud de onda sea absorbida [74], y llegue con menor intensidad al receptor, disparándose la alarma (fig. 3a). Otra manera sería ubicar el emisor y el receptor desalineados (por ejemplo, en ángulo recto) de tal forma que la luz infrarroja no llegue al receptor en condiciones normales (rayo directo o direccionado), y ante la presencia del humo la luz se refleja y se dispersa al chocar con las partículas, llegando al receptor lo cual permite disparar la alarma (fig. 3b).
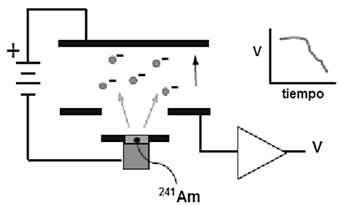
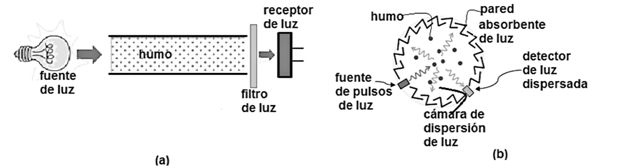
Figura 3: Detección fotoeléctrica de humo. a) versión no dispersiva de la luz NDIR. b) versión dispersiva de la luz DIR.
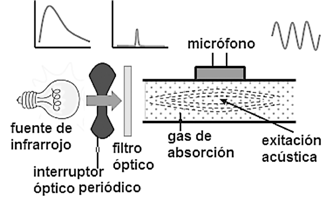
El método fotoacústico es una variante del método no dispersivo (NDIR) que incorpora un micrófono sensible a ondas de presión provenientes de la cámara detección del gas. Estas ondas se producen debido a que el gas absorbe la longitud de onda de la luz, se energiza y esto hace que cambie su densidad periódicamente (de acuerdo a la presencia o ausencia de la luz), lo que produce la onda de presión sobre el micrófono (fig. 4).
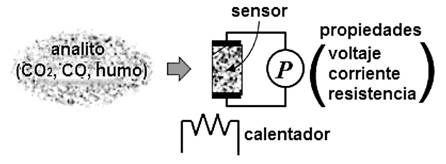
En el caso de recurrir a la interacción entre la variable química (analito) con el material del sensor, ësta puede ser pasiva o activa. La interacción es pasiva si ocurre a temperatura ambiente y activa si necesita calentamiento. El esquema conceptual se presenta en la figura 5.
Para la interacción activa se utilizan sensores cuya base activa es un granulado de óxido metálico (desarrollado por Naoyoshi Taguchi en 1968), con óxido de estaño (SnO2-x ) como material preferido, el cual es semiconductor tipo n, y presenta una ligera deficiencia de oxígeno dentro del granulado. Cuando este material se calienta y entra en contacto con el ambiente, se donan cargas negativas al oxígeno adsorbido y se forma una superficie enriquecida y cargada negativamente, y también resulta una carga espacial positiva en el granulado, creándose una barrera de potencial que dificulta el flujo eléctrico entre los granos. La presencia de gases como el monóxido de carbono (CO) o el metano (CH4) que pueden ser oxidados (o sea, son vapores reductores) tiende a disminuir la barrera de potencial al reaccionar con la superficie, facilitando la conducción eléctrica en el sensor. La aplicación de calor produce que la reacción ocurra a mayor velocidad (mayor conducción), y la selectividad se define de acuerdo a la temperatura de operación y el material del sensor. Se logra una alta sensibilidad a bajas concentraciones de químicos, sin embargo depende en gran medida de la humedad. Las principales ventajas incluyen bajo costo, tamaño reducido y una operacíón prolongada hasta por 10 años para la detección de CO. Las desventajas incluyen la poca selectividad química, la sensibilidad a las condiciones de temperatura y la humedad, y el consumo de energía para el calentamiento.
Los sensores electroquímicos miden los resultados de la reacción química entre dos electrodos, esto incluye la oxidación (pérdida de electrones) y la reducción (ganancia de electrones) en uno u otro electrodo. El proceso comprende el movimiento de iones a través de un electrolito (conducctor iónico) que conecta los electrodos (pueden ser más de dos electrodos para controlar mejor el proceso), los cuales alimentan la circuitería externa para medir la corriente o el voltaje que se producen (y que permiten determinar la concentración del gas). Se usan ampliamente en la detección de CO y su operación se extiende por seis o siete años. La corriente producida es proporcional a la concentración de CO, tienen dimensiones reducidas, bajo consumo de potencia, bajo costo, alta sensibilidad y buena selectividad para el CO (baja sensibilidad para otros gases). La principal desventaja es que para la calibración y la operación necesitan un gas de prueba para la validación. Un ejemplo de este sensor es el Figaro TGS 5042. En la figura 6 se muestra un esquema y la respuesta del sensor mencionado a una concentración escalonada a pasos de 5ppm de CO y a una concentración única de 20ppm [71] Las reacciones químicas que genera la corriente son: CO + H2O → CO2 + 2H+ + 2e- en el ánodo, y 02 + 4H+ + 4e- → 2H2O en el cátodo.
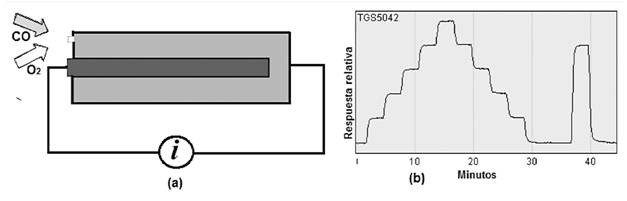
Figura 6 (a) Esquema de un sensor electroquímico. (b) Respuesta relativa del sensor Figaro TGS5042 a concentraciones escalonadas de 5ppm CO y a una concentración de 20ppm [71].
En cuanto al consumo de potencia de este tipo de sensores A. Somov et al [75], [76] proponen la energización de un sensor de gases producidos en la etapa inicial del fuego producto de la pirólisis, mediante una señal PWM aplicada al sensor, y reportan que el mejor resultado se obtiene con un ciclo del 70-80% para lograr una temperatura de 450oC y la mejor sensibilidad, y mejorando el consumo de potencia en un factor de 3 (desde 100mW hasta 30mW). Bayo et al [44] proponen un nodo energizado con una señal PWM con un ciclo de trabajo de 33%, para medir humo mediante la refracción óptica producida por las partículas, y otras variables ambientales útiles para la detección de fuego en el bosque . Estos autores reportan 3 niveles de consumo: 108μW para la condición dormido del nodo, 165mW para la condición de medición y 159mW para la transmisión de datos.
También se investigan sensores basados en semiconductores MOSFET[77] siendo la modificación más simple la supresión de la puerta. Un OGFET (Open Gate Fet) es un transistor FET sin puerta que se expone a una atmósfera gaseosa, y la corriente del drenador varía en función de la presión parcial de los gases. Una versión mejorada es el ADFET (Adsorption FET) en el cual la capa de óxido tiene un grosor de 5nm, y responde a concentración de gases como el CO con un momento dipolar permanente [78]
Actualmente se encuentran sistemas multicriterio (Mcfa) para detección de fuego que integran los métodos señalados anteriormente (NDIR para CO y CO2 combinados con detectores de humo) para lograr mayor eficacia en la detección al inicio del fuego y disminuir las falsas alarmas [64].
Es importante resaltar que la respuesta de los sensores comentados a la presencia de las emisiones del fuego depende de la concentración, o de la velocidad de llegada de las mismas al punto de contacto con el sensor para concretar la detección.
Conclusiones
De acuerdo a las observaciones hechas en la sección 3, la selección de los sensores utilizados para realizar la DTIF debe hacerse para obtener resultados positivos en tiempo real, escalable, a bajo costo y en forma práctica. El tiempo real se logra con sensores de umbral absoluto bajo que permitan descubrir el fuego al principio, cuando tiene poca intensidad y acercando el sensor al lugar de origen del fuego. La escalabilidadl se logra utilizando sensores que permitan la detección individual a la mayor distancia del fuego y diseñando un despliegue del conjunto de sensores que asegure mas área de cobertura. La reducción del costo se logra al disminuir los costos del diseño electrónico, de la captura y procesamiento de los datos del sensor, de la captura y transmisión de los datos del sensor, del umbral del sensor, de la distancia de detección y área cubierta del sensor, del despliegue de los sensores, de la vida útil del sensor, de su mantenimiento y operación del sensor, y utilizando componentes de fácil acceso en el mercado. La forma práctica incluye utilizar sensores de baja potencia para mantener el presupuesto energético del nodo sensorial lo más bajo posible y de esta manera ahorrar la capacidad energética de la batería para que dure las 24 horas.
De acuerdo a las observaciones de la sección 4.1, la ventaja de los sensores para las emisiónes infrarroja y térmica (variable física) es que tienen una alta sensibilidad (que permite la detección desde larga distancia), La desventaja consiste en que el follaje y los obstáculos del terreno atenúan la emisión infrarroja en los momentos en que nace el fuego (justo cuando se requiere lograr la DTIF), y para aprovecharlos mejor se requiere el emplazamiento de torres para tener línea de vista, y el procesamiento de la imagen correspondiente (esto va en detrimento del costo y la DTIF en tiempo real).
De acuerdo a las observaciones de la sección 4.2 al utilizar sensores de emisiones químicas producto del fuego (CO, CO2 y humo), las características mas importantes que estos deben mostrar son:
tiempo de respuesta corto, bajo costo, alta selectividad, alta sensibilidad a la detección del gas, largo tiempo de vida útil, dimensiones pequeñas, baja deriva de la variable de salida con el tiempo, bajo consumo de potencia, libre de la interferencia de gases atmosféricos, facilidad para detectar el mal funcionamiento.
Si en la detección de fuego en el bosque se cumplen estas demandas, los sensores contarán con las siguientes ventajas:
Se pueden utilizar para la detección terrestre del fuego en su inicio (pues las emisiones del fuego en el bosque se difunden por el aire y pueden llegar a los rincones del bosque), no necesitan línea de vista ni ubicarse a gran altura. El mercado ofrece sensores para las variables químicas de buena sensibilidad y de costo variable, así como sistemas para protección contra fuego en espacios cerrados cuyas normas de instalación y desempeño han sido probadas y refinadas, además de sensores y sistemas para la detección óptica del humo ( la adaptación de ambos sistemas para emplearlos en la DTIF debe ser objeto de investigación). El sensor genera cambios de voltaje en los terminales de salida ante la presencia de la variable química (por lo que el procesamiento de la información es mas simple que un procesamiento de imagen), y antes de que se presenten concentraciones que lleguen al límite máximo soportado por los sensores, ya se habrán detectado concentraciones inferiores del gas (propias del umbral de detección del inicio del fuego, y esta es la condición básica para la DTIF).
Las desventajas más notorias consisten en que algunos sensores requieren de calentamiento para poder detectar el gas (lo que implica consumo de energía), y se pueden dañar si se superan los valores límites de operación especificados por el fabricante (para CO o CO2). Tienen un límite máximo para la humedad relativa a la que deben estar expuestos (por esto se requiere alguna estructura de protección adecuada cuando se usan en el bosque). La concentración de humo y gas se reduce en el punto de detección, debido a la dispersión en el bosque (esto afecta el rendimiento de los sensores que requieren de una cantidad de ppm y porcentaje de oscurecimiento mínimos para lograr la DTIF al inicio de fuego).
Esta situación estimula la investigación para aumentar la concentración en forma indirecta en el punto de detección y también el uso de sensores de variable química para lograr la DTIF.

